Hi everyone, I hope you can help me with this one =/
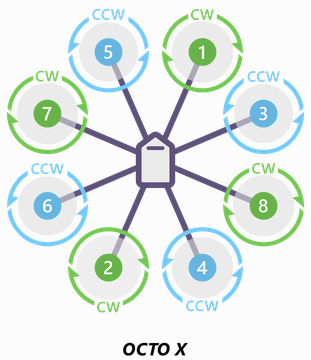
I build an aluminum frame X octocopter with aprox. 30 kg with aprox 40% power to weigh ratio with a 3º degree inward tilt on all motors, here is the basic layout:
(All motors are evenly spaced from center, despite what my paint skills says)
Here is the components overview:
- 8 x P60X tmotor 170kV @ 12S
- 22 inches t motor foldable props
- Pixhawk 6x
- 2 x external gps
- 2 x 22ah 6s 30c batteries
After carefully bench testing the frame at full throttle and long runs at flyable thrust, I was confident to test the drone on the field.
I got a solid compass calibration on all compasses and gave 1 and 2 priorities to external compasses. I did basic attitude and yaw tests, and all seemed well.
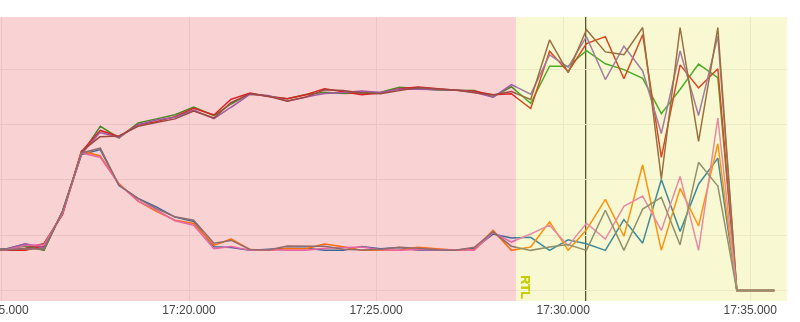
In alt hold I took off to about 5m with rock solid stability and no errors from event messages but then I saw that the drone started spinning counterclockwise with increasing speed and was out of control in a couple of seconds.
I tried to stop the spinning with yaw inputs, but the spinning got worse. In a last attempt to stop the spinning I changed FM to RTL but with no effects on spinning. However, the drone became even more instable with increasing oscillations in roll.
When the oscillations in roll went well past 45 degrees, I disarmed the drone to not harm anything or anybody.
Luckily, I “only” managed to damage the frame and props. I looked at the log and didn’t see anything out of the ordinary. Either something extremely basic went wrong or it was my lack of experience with metal frame copters.
Somehow, I managed to break the SD card upon removing it from FC (geez). Later I’ll try to recover the parameters file.
Can you guys help me find the cause of this spinning issue?