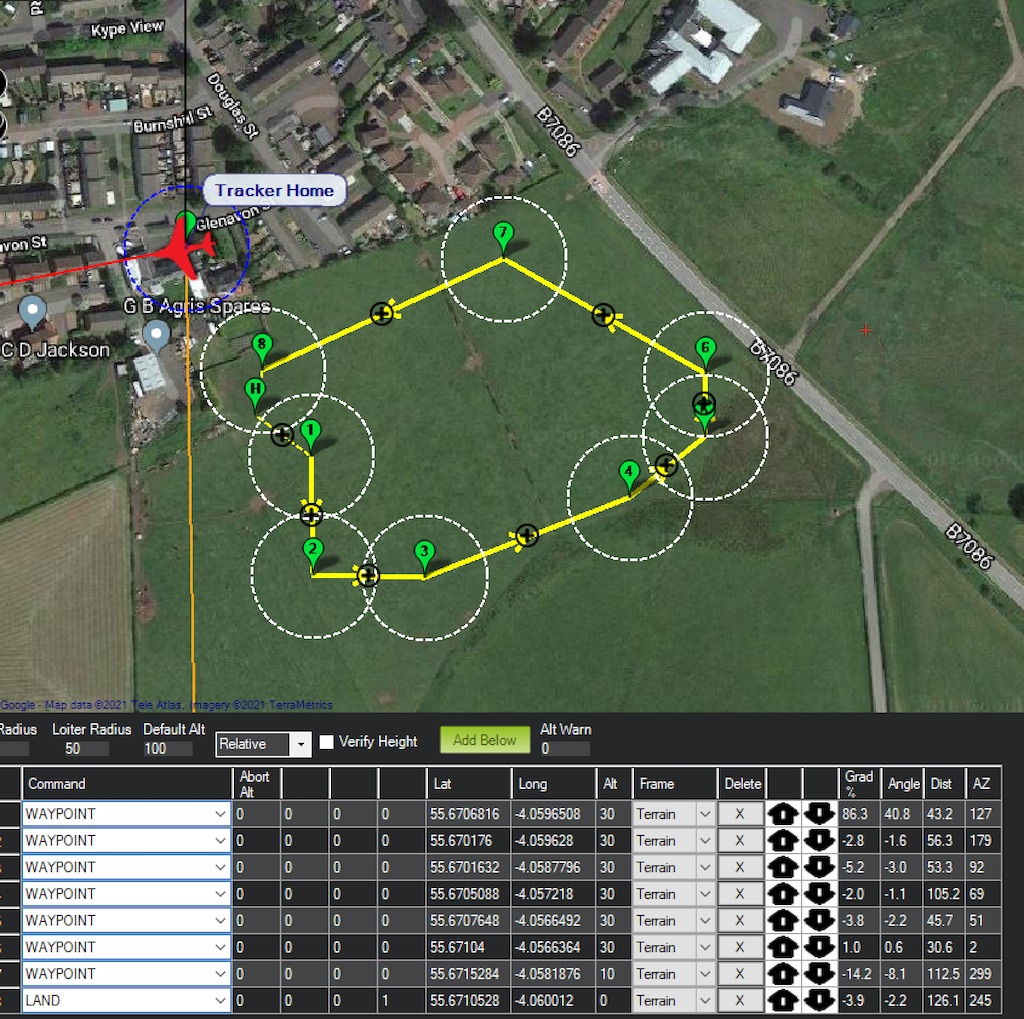
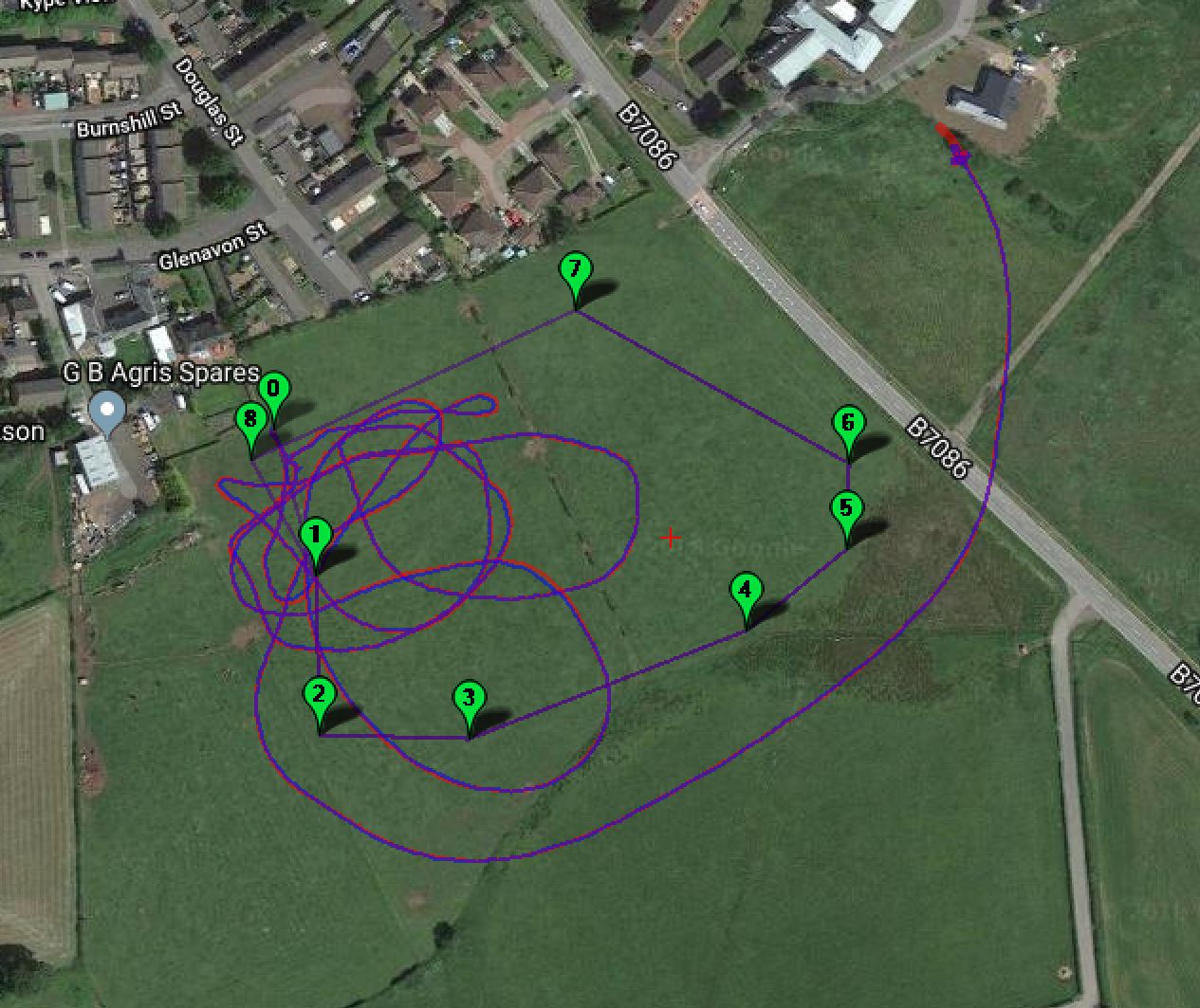
Hi, I just flew my z84 wing for the first time this year. Just before flying I updated the f/w from 4.0.5 to 4.0.9. I noticed on launch (Stabilize mode) that the controls were very sensitive, and I saw a lot of tail flutter (in pitch axis) on launch - which I have never seen before on this plane. This soon resolved itself though and I flew a few loops. I was flying to test a mission with a landing sequence, so switched to AUTO and the mission started - seemed OK at first and I was hearing reports (in yaapu telemetry) that it had gone through several waypoints, but then the plane dipped down below my visible line of sight - I assumed it was terrain following, so expected it to appear again, but then nothing. On my way to rescue it I could hear the motor screaming still. The plane had gone off the mission by a good bit, crossing a road and landed in a field near a house (fortunately the owner in good spirits, although looks quite confused at first) - but the motor remained at full throttle (hence the house owner’s interest), and I could hear the pitch reducing as the battery died. I have attached a dropbox link to the log in case anyone is willing to take a look. Also some screen capture images, one showing the intended mission, and the other of what actually happened.
Double check your radio trims set up on it. During your auto mission the radio is still inputing values to the flight controller around 1600us for pitch and roll, however RC1_TRIM and RC2_TRIM are both 1500. This means the flight controller thinks you are nudging the input to nose down and turn as it’s flying the route.
I suggest reset your radio trims to neutral (or if you can disable them all together), and set SERVO_AUTO_TRIM=1.
Well spotted Allister! I am guessing (having not flown this plan this year) that I must have made those trim adjustments on the radio to get the plane flying level in Stabilize mode, forgetting that this would have an effect on flight in Auto. I am certainly out of touch with Ardu… having been away from the hobby for a short while. I’m going to get those trims (and level calibration) sorted and will report back on future mission attempts. Thanks again
I corrected the trim issue and ran through a level calibration, then went to try another mission today. It flew - kind of OK, it was certainly closer to the waypoints this time - there were no trim issues at all - even switching to manual it flew in perfect trim (so I have no idea why my trims were so out initially). The landing was about 80m short of the programmed land point, but I manually overrode the controls to get a nice landing. I think I need to apply some tuning to the landing parameters to get things better. I also had to pull up a few times during the short mission circuit. I’m guessing the terrain tiles aren’t as accurate as I thought they would be. All good though for future experimentation.
One thing from my original post which hasn’t yet been responded to, is why when the plane crashed did the motor remain running at full throttle, and it didn’t detect a crash condition? Its kind of good that the motor was running to be honest as it allowed me to find the plane - I could hear the 2600kv motor screeching from 150m away
Crash detection on a plane isn’t as easy as it sounds. I’ve had mixed results with it. (Or the crash has been very “certain” and there wasn’t enough left to do the detecting)