My carbon core cortex (Quad setup with pixhawk 2.1) had a crash a week ago.
The RC combination was Taranis with X8R
1.Took off in STABILISE and did some maneuvering
2.Then switched to ALT HOLD
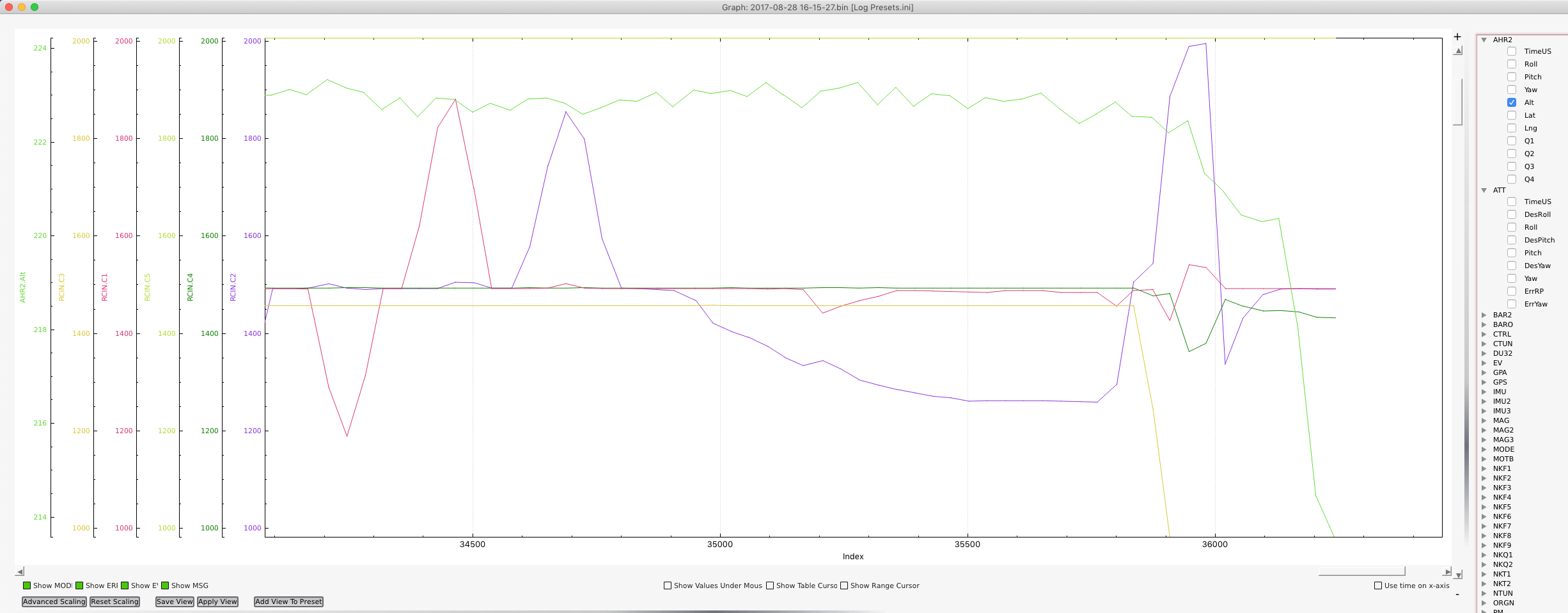
3.Now in LOITER. It was hovering at this point and I tried accelerating forward. Once the input was given it suddenly crashed. At this point, the throttle stick was at hovering position. But the log shows a sudden dip in throttle before crash whereas the throttle was not brought down in Tx. There was no ERROR notification too.
I need help in solving this issue. Hope one of you can find something.
I’ve attached the flight log link below.
https://drive.google.com/file/d/0B36wWqagEnPEVHMyRUZwbDZfcVE/view?usp=sharing