Hi Everybody !
I had a problem last day with a steadidrone MAVRIK X8 that crashed by itself into loiter mode. It was a bit windy but not too much so I assumed that it should not have been a problem for that drone. I would like to understand the reasons of this failure before flying again.
After a while in loiter Mode, the drone began to rock from the left to the right, more and more, then it crashed on the ground.
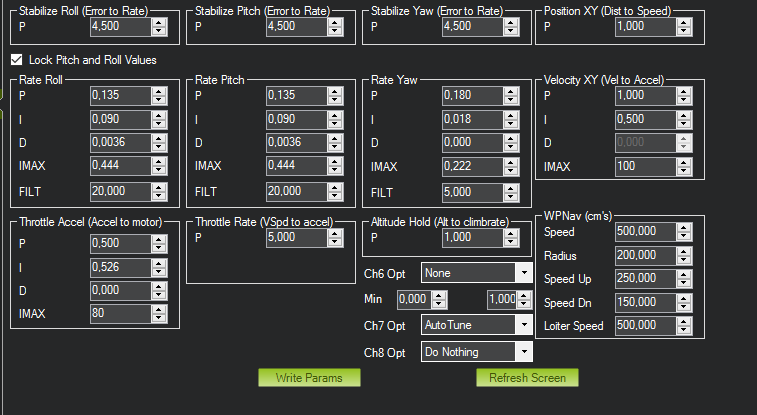
This drone is composed of a 3DR Pixhawk, with a 3DR GPS
Here are the log Datas : https://apps.etre.ensam.eu/FileZ/90zmx0
Thank you very much for your answers