Hi,
I’m using a s800 wing with pixracer (arduplane 4.2.1), frsky passthough telemetry. fbwa, fbwb, Loiter, stabilized was working well (compass is disabled, voltage sensor is not working correct, wifi-module was not used on pixracer, FC is mounted 90 deg clockwise).
There was only low wind or turbulence.
I got a problem after starting in takeoff mode: takeoff was doing well, but doing the loiter after takeoff motor was constant on 100% and the wing was rolling over 45deg - kind of flipping - and loosing alt. At the first autotakeoff I could manage to prevent a crash. but at the second autotakeoff I was looking a bit too long…
Verify that the C of G is correct, both x and y. Or do you have a camera or something creating extra drag on the right side of the plane? Verify the mechanical trim of the servos. Wings often require some positive reflex in the elevons, just 1 or 2 mm.
In each case I think it’s actually a stall that’s happening. The plane has high bank angle, and still positive pitch angle. Auto modes will do great to prevent stalls (in many cases) but they aren’t great for correcting a stall and some times can make it worse.
The same thing i had on arwing. But i try to change to FBWA , and control did not come, as if the mode did not turn on. although according to the logs everything turned on on the OSD too.
Another friend had a similar experience, but there are no logs, another friend also the same, and there is log … everything is strange with throttle there … there are two log files … I can drop it in a personal
The FC was trying to make the corrections but the plane was not responding. I’m making the assumption that the plane has been flown before and is properly tuned. Meaning this is most likely a mechanical or physical problem, and not one with the controller. Possibilities could be: Servo failure, Wrong C of G or a C of G shift.
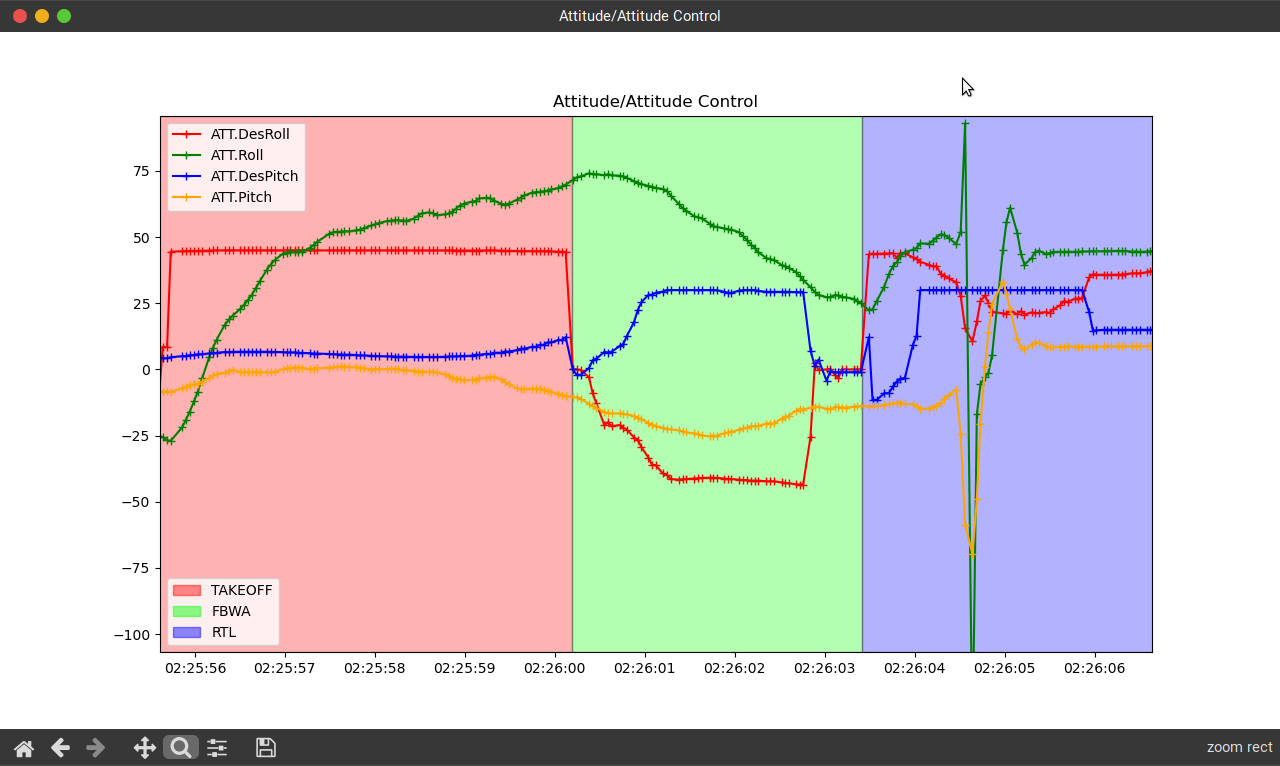
In the turn the plane overshot the roll angle. The FC was trying for ~73, but the plane overshot to 85. The plane also overshot it’s loiter altitude, so it was trying to correct for that. I’m going to take a WAG and say the crash was because the plane stalled at such a high bank angle when it tired to correct for the pitch when it reached 50m. There’s a blip in the GPS speed at that moment so I wonder if wind was a factor as the plane would have been flying down wind at that moment.
I wonder if increasing the loiter radius a bit more might help? There’s a fix for the altitude overshoot, but I can’t think of it right now. Maybe after a few more coffees it will come to me and I’ll post it.
flew for almost a year about 100 launches in INAV and on Arduplane, after this fall the winglet broke, it was installed from another arwing, already 5 flights no problems. Extremely eliminate the problem of CG and servos.
I believe you. I don’t need to look at the RC inputs because I can see that the FC was demanding 25 degrees nose up, yet the nose dropped. The FC was demanding upwards of 40 degree left roll, yet the plane was very slowly reacting, and still significantly rolled to the right.
I do have one theory, but before I go shooting my mouth off I need to see something. Can you post a log from a normal successful flight with the same plane? Something with at least a minute or two of FBWA. DM me the log if that’s better for you.
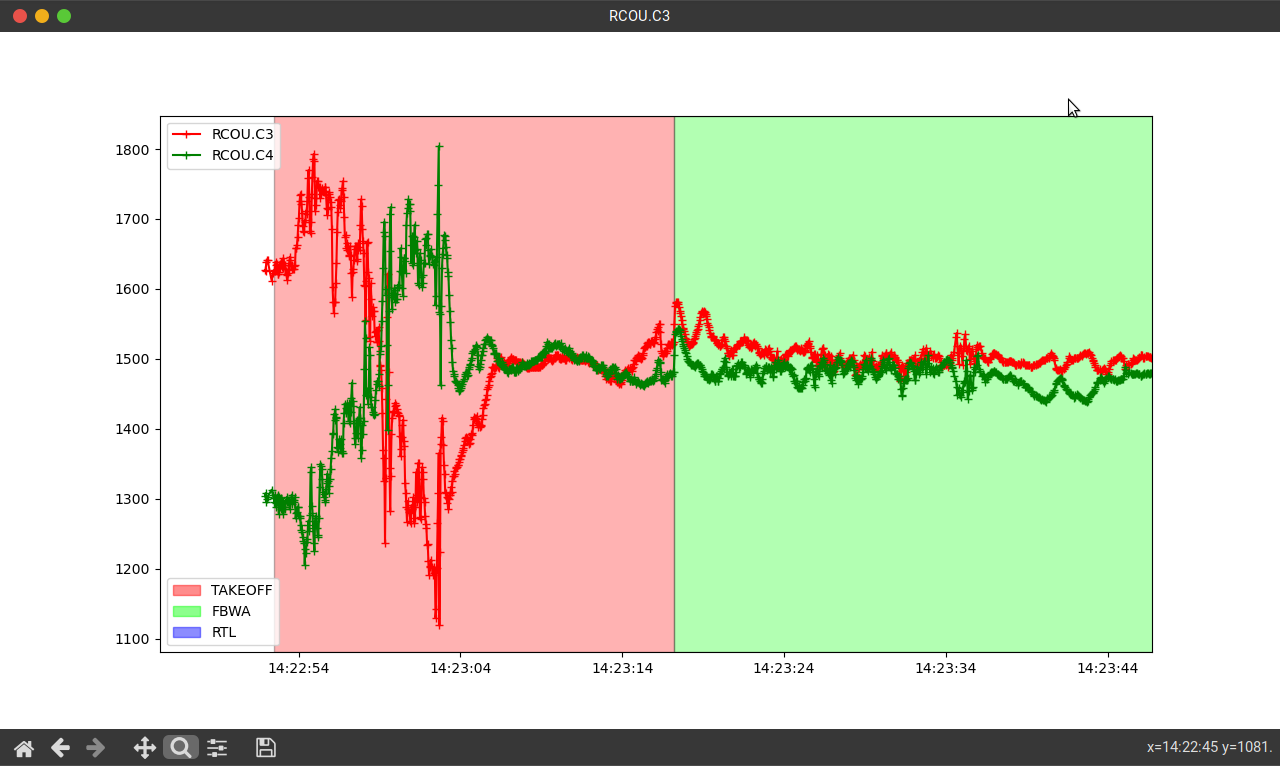
You can see the more aggressive movements during the initial takeoff, and then the continuous movement and adjustment afterwards as the plane transitions in to FBWA and normal flight. All good.
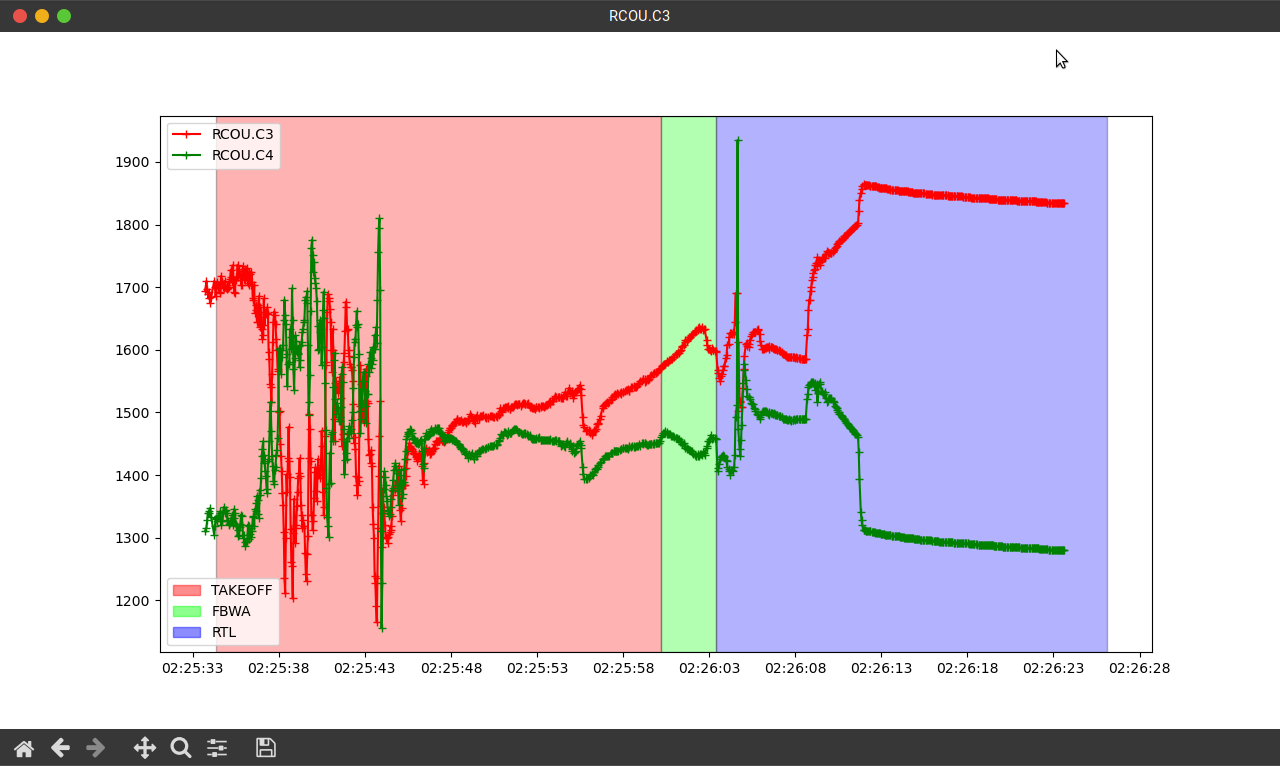
The servo outputs just seem stall and stay moving in the same relative position. The PID loop looks pretty flat through this part of the flight too. I thought maybe there was a tuning issue, but the good log proved me wrong. I have a similar plane (AR900) with the same controller and our tuning looks very similar, in fact I would say that yours is tuned better than mine.
I don’t know why the servos would get stuck like this. I think this is a question for one of the devs. One thing I would suggest is updating to the latest version, in case there was some kind of issue with that version. Sorry I can’t be of any more help on this one.
yep Thats what i talking… thats problem in software. also check throttle and speed… it’s more that must be… and the same in DarkSoulRL log, and my friend had hte same… How to take this info to devs?