@kuspower, really sorry about your crash. I hope the damage wasn’t too bad. Thanks very much for the report though. TBH, I’m slightly surprised at how many reports we are getting.
@disgruntled-patzer, I’ve asked @tridge if he has a better idea of which I2C devices can cause the problem. I haven’t personally seen the list.
So far we haven’t seen any repeats of the issue with Copter-3.6.11 users so we strongly recommend users upgrade to 3.6.11 if they’re using something older. Perhaps we need to make a more visible annoucement of this recommendation.
I would like to report that after fixing the airframe, replacing propellers, and updating the firmware to 3.6.11, the drone is flying again with no issues. It’s doing auto missions fine. GPS modes, rangefinders, grippers and precision landing are working as expected. Hopefully this is really a stable version, we will continue to test fly in the following days. Thanks!
I’ve changed the GPS units on two identical hexacopters, sporting Pixhawk 1s with 3.6.9, and since the replacement M8Ns lacked mags, I’ve used QMC5883s from a local Arduino shop.
One kept rebooting on the ground, the second started throwing compass errors after takeoff, so I landed immediately. Replacement mags - original HMC5983 - arrived yesterday, and I’ll start testing monday.
Hi there i have a 3DR Iris flying smoothly the only think by yesterday the 2D tarot gimbal stops tilt usingvthe knob at the transmitter any idea why and how to fixe it?
Regards
Houss
@Houss_Ribeiro Hi, welcome to the community. I suggest you start a new thread and ask for help on this particular issue. This thread is about solving a crash that myself and other people experienced with Copter 3.6.10. It is recommended that all users upgrade to 3.6.11 to avoid the I2C storm problem that seems to be the root cause for our crashes.
Hi Samuel. Sorry for using a wrong space to address my issue. Thx once again to welcome myself in the community. Anyways i did solved my issue.
Have a great day
Hello, I just had carbon copy crash on P’xhawk 1 Nuttx 3.6.7 version as i have been flying with this drone withou an issue quite long time. I am using GPS that has QMC 5883 chip on it.
I am not a expert on analyzing logs but I couldn’t figure out the exact reason of the crash.
What actually happened at field was dron was doing RTL and it started to descend as it suppose to be and then it fell like a rock. the rescue parachute was not even triggered.
I was late to see this post to upgrade to new version as I see now. So if this crash is related to same subject then I know what to do now. If not it will be nice to know the exact reason.
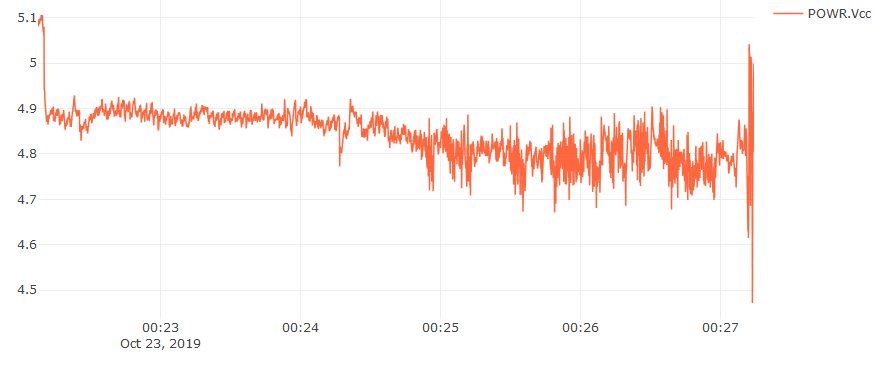
I’d say you need a better regulator for the flight controller, it should output 5.1 to 5.3 volts consistently and not be affected by the battery voltage like your existing setup is.
4.7 volts is getting into falling-brick territory.
Maybe examine your wiring, wire sizes and connectors.
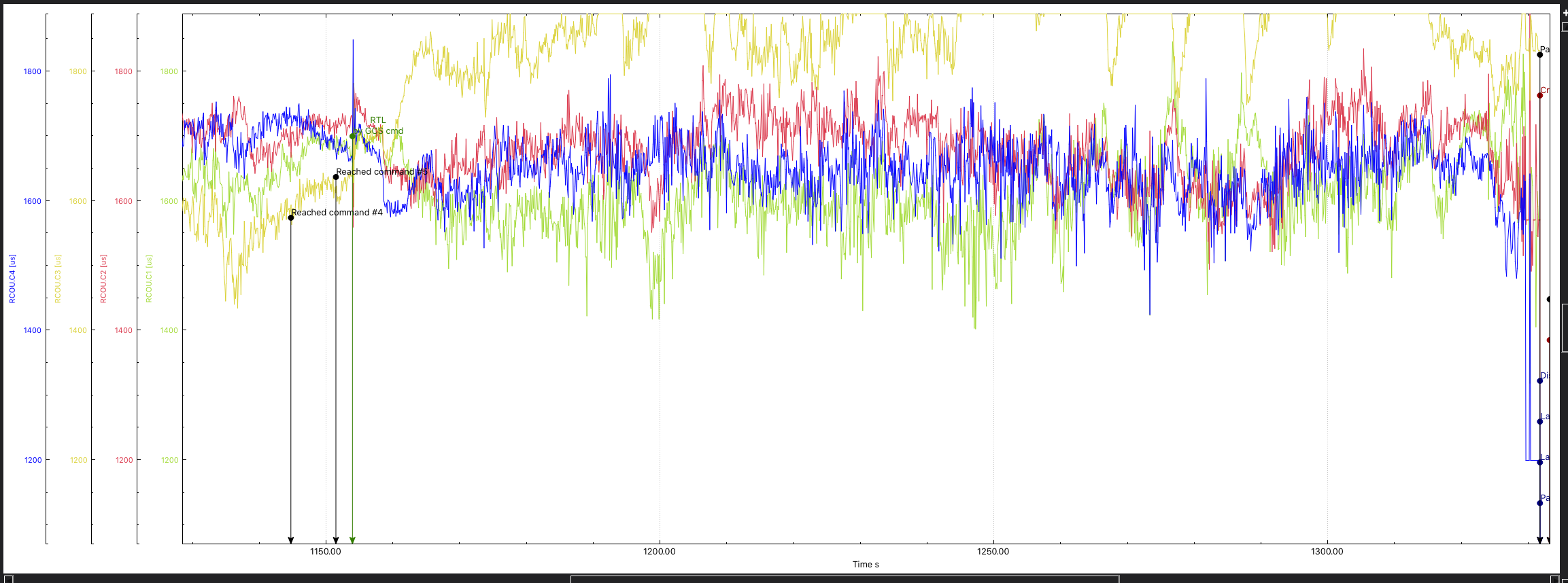
I also note that your quad is heavy/underpowered with an average PWM output around 1700.
This may be fine in normal flying but gives you no margins for any errors.
As @X1Aero pointed out your batteries were starting to get low which was not helping a copter that was struggling to stay stabilised with little headroom left in power for stability.
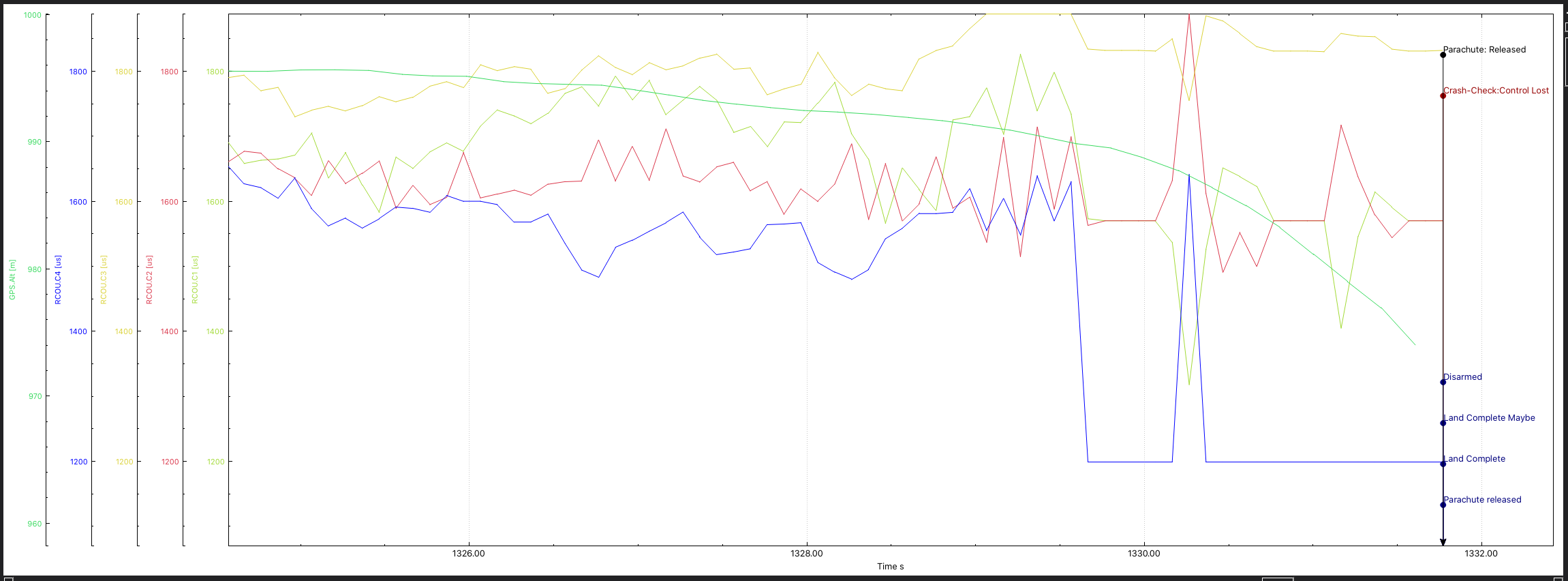
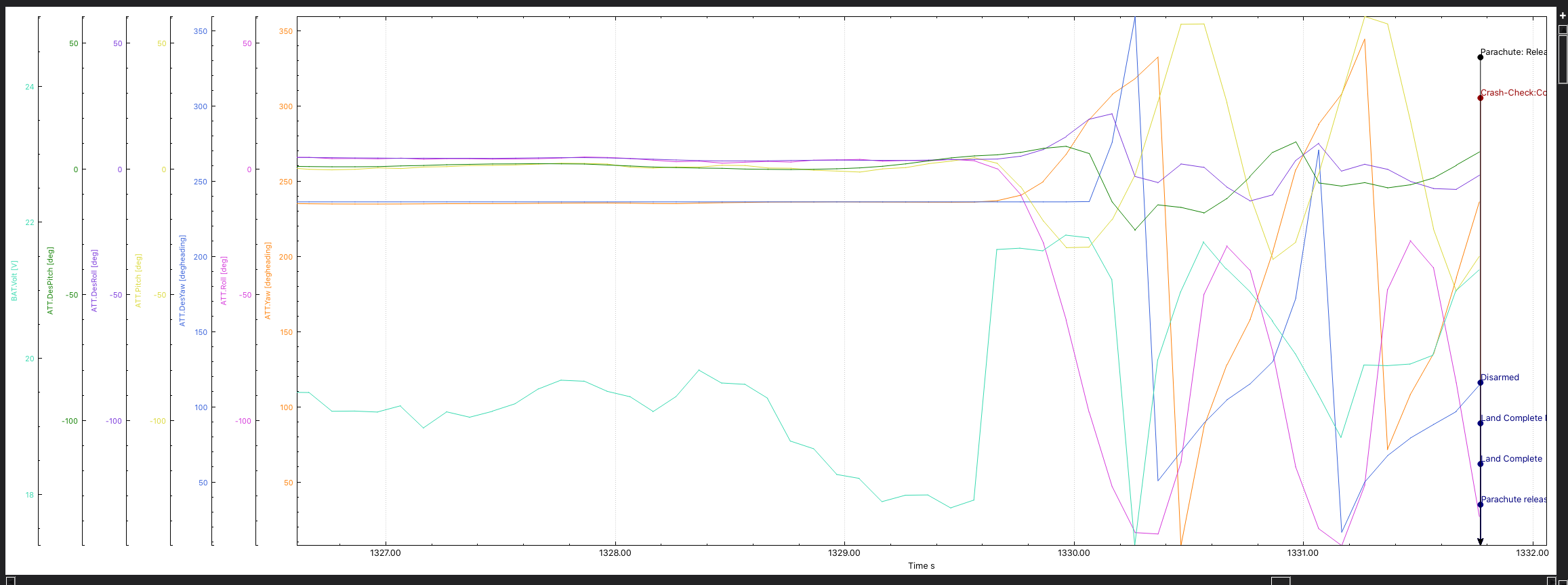
I noted you said the parachute was not triggered but the log shows the controller did trigger the parachute.
So either you have a fault in your parachute deploy circuitry or there was not enough current left in the batteries to do the deployment.
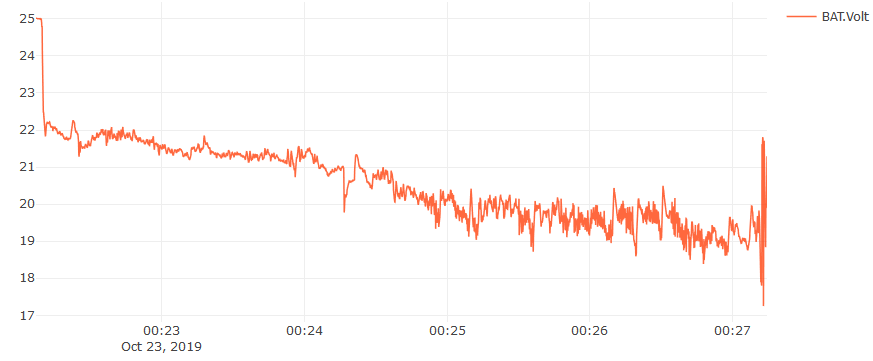
You can see here the voltage at which the controller ran out of power keep stability.
This is a good case that illustrates why we use hexa and octo frames for professional use as we have more redundancy and also lower load on the motors.
Thanks for all those feedback’s as they led me to pin point the problem. The battery is quite new on this aircraft and i had made flights with it at these battery levels before. As from the batter graph where there is a drop below 18V and a sudden jump to 21 V. So based on barometer reading right before this voltage spike the copter was descending from 40 meters for landing and there is sudden drop at altitude of 10 meters and then it gains back some then at 20 meters it says parachute released but the copter was falling like a rock from that point.
The pixhawk 1 is powered directly with a power module. yet both pixhawk and the power module are clone versions in which I am replacing them with pixhack v3 now.
I also noticed the motor 4 was not acting properly which may be a mechanical problem triggered that.
I will go thru all the configuration once again.
Hopefully this is all related with mechanical failure.
I have replaced the old autopilot with a new one (pixhack v3) with the stable version 3.6.11.
I think those problems are no longer there anymore.
Log is here;
The flight is done at hover around 4 meter and it flew very well. The board voltage on this one is now 5.1 V on average and battery usage is more healthy. also motor balance is better. The motor mount has not changed by the way. And it was windy this time.
 flying smoothly the only think by yesterday the 2D tarot gimbal stops tilt usingvthe knob at the transmitter any idea why and how to fixe it?
flying smoothly the only think by yesterday the 2D tarot gimbal stops tilt usingvthe knob at the transmitter any idea why and how to fixe it?