I crash my new drone during the first flight.
it is an F450 frame, Pixhawk 2.4.8, I upload the 1M version of Arducopter, the battery is a 3S 5000mAh fully charged.
When I start, it was in Altitude Hold mode, I had a buzzer on the battery in case the voltage is to low, in the video you can hear it, and at the same time I lost control, so I stop the motors.
I guess I have an issue with the battery, can you help me to do the analysis of the logs? I also saw an issue on Kalman filter, but I don’t know if I read it correctly
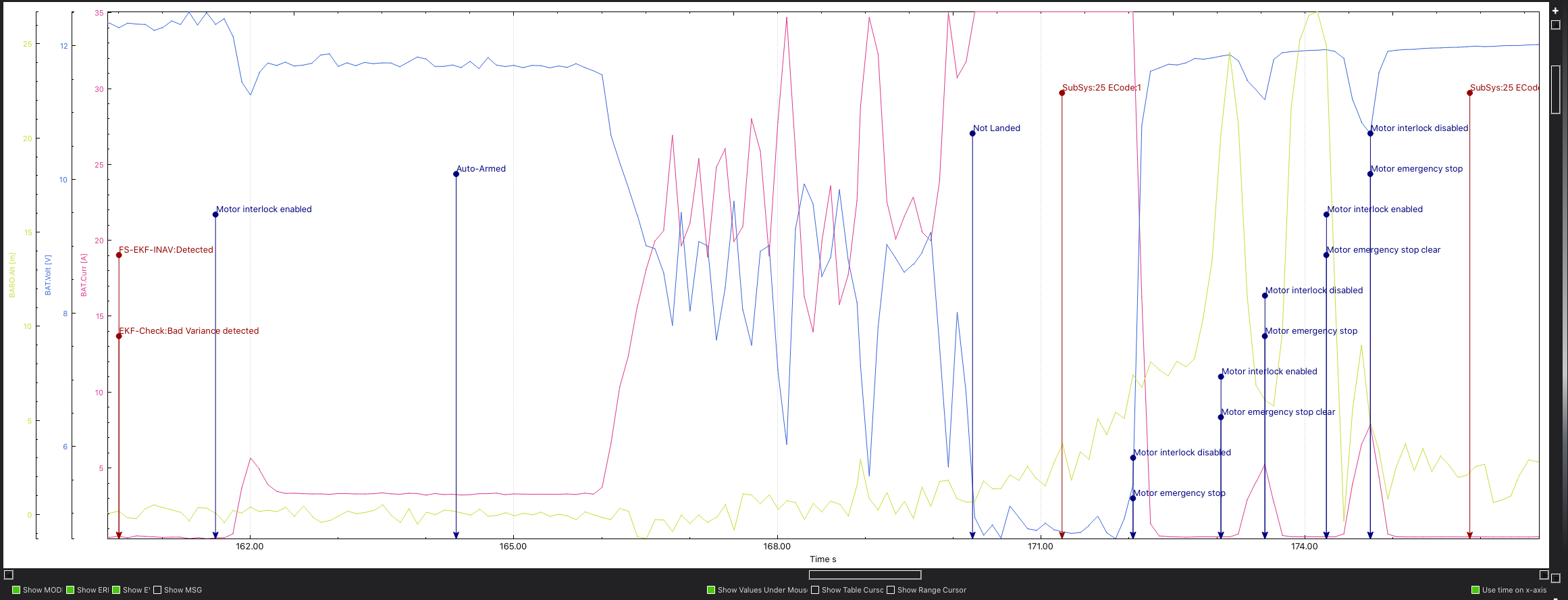
I’m not that expert on logs, however the graph below clearly shows your battery voltage sags badly to 9v and to 4.6v clearly not enough juice in it and the motors demanded more than 30amps.
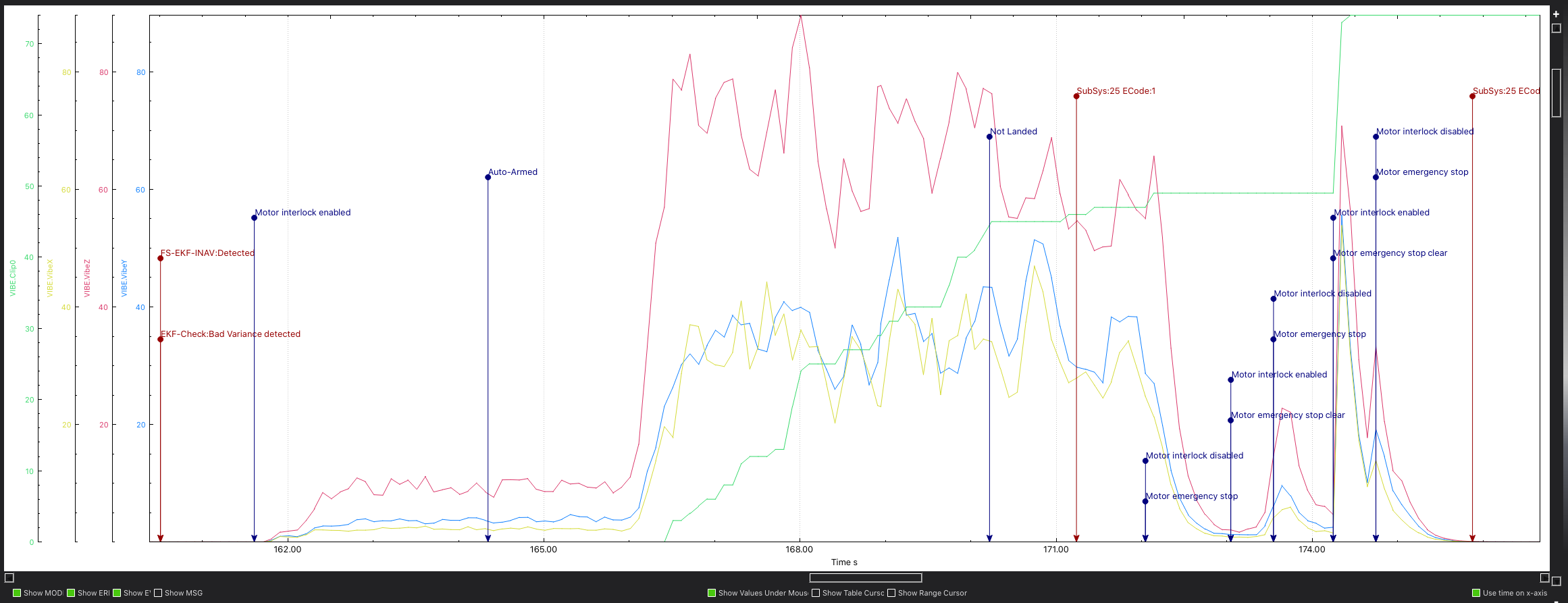
P.S. It seems like you also have an issue with what is called “vibrations” with clipping, however I’m not perfectly sure if it is only because of your quad’s low battery issue. This is something to keep an eye on because it is known to be one of the major issues of crashes and fly-away.
Hi Gal,
Thank you for your help, I agree the power was very low and the beeps on the video is saying that. My power brick is very cheap, it may be the cause, how to know? also, I had difficulties in liftoff so I put 100% of the throttle at the beginning. also, I don’t see wiring issue (or not easy one to find, if you have a technic to check, I’m very interested)
Best regards
Kb
Kb, no special Technic, only visual that all wires are ok. However, your voltage sags to 4.6 volts and the motors demand 35 amps seems like a disaster bounds to happen.
Your power brick was already pretty depleted on take off from all your previous tries (in log) and you got many errors of potential thrust loss, so either do another short try with a fully charged battery or try to get a decent battery pack.
Gal
For a battery to sink that low from 12v (below 5.5v) it is not capable of delivering the current and the copters reaction will be to get very unstable and crash.
VIBES:
Way too much vibration.
You will need to do some vibration mitigation here.
You have a kit of very poor quality components. Those motors with collet prop adapters are not suited for multirotors and those no brand “yellow wrapper” ESC’s are no better. Your RC receiver was a good choice.
But perhaps you can get it flying. How is the Flight Controller mounted now? That FC mount you linked to can work. Not sure what to say about the power. If that battery was at full charge when you started it’s probably bad.
Thank you, yes the quality of components is quite poor I agree but I’d like to try again, The FC was taped (double-sided) on the frame but I’ll put this next time:
I’m still trying to find a good 3S battery (it is not easy for a 5000 mA.h ! )
About the power distribution module, do you know a good one? I don’t trust mine