Hi to all members of the community!!!
I need your opinion on this crash. I have attached the flight log here.
Airframe: Custom
Avionics: 3DR Pixhawk with stock power module, Hitech servos with BEC power supply, RFD900 modem with BEC power supply
Engine: IC engine well insulated not to affect avionics inside.
The airframe is tuned to fly stable and true to its nature. The aircraft lost downlink to the GCS at approximately 3kms from home location and by the time, the link got back, the aircraft seemed to be already in a bad attitude and crashed into the ocean.
Thanks in advance.
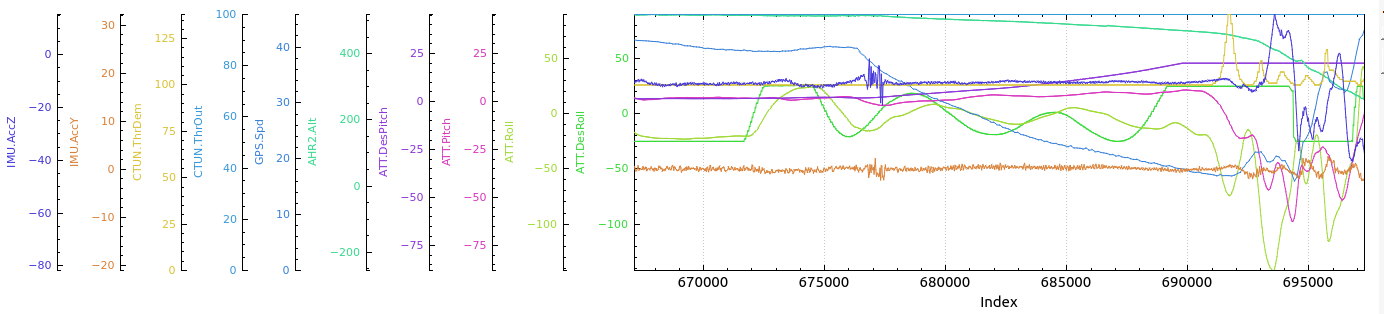
The log is missing many interesting items.
Still: observe how your groundspeed sink well below ARSPD_FWM_MIN (40) , as it lost altitude and increased pitch… right after some unusual vibrations: most likely an engine failure.
I really like more complete logs, so I won’t spend more time analyzing this, but … you can be fairly sure about this.
Thanks Andre for the inputs. But this is the log from the flight controller. Could it be an issue with the flight controller or anything coming off loose inside the avionics bay. When recovered, i could see all of the avionics intact… but covered in water(obviously). I am uploading the Tlog as well now.
Also as per the waypoints, the aircraft was supposed to take a right turn but it turned left…
“. Could it be an issue with the flight controller or anything coming off loose inside the avionics bay”
not sure if you read what I wrote - of course, the servo PWM to throttle could have fallen off, that is just crazy speculations, what is fairly sure, is that you lost the thrust, which is pretty dangerous, considering it flew at 100% throttle just to keep minimum FBWA speed.
Okay on the APM Planner2.
Would the lost in thrust be the reason for that sudden left handed turn and a drop in altitude instead of a right handed turn at same altitude??
Anything on the remnoise and remrssi coinciding just before drop in speed??
rssi or telemetry loss could not cause it, as your shows no sign of throttle to go low, so no failsafe/rc failsafe did that.
Your heading were a bit all over, I can’t tell how well, or, not, tuned/set up it was, the AP estimated only 3m/s wind, but it was early in the flight and no pitot. Still - you need to observe the following:
yes, heading was a mess, it overshot earlier waypoints too, possibly due to wind (if more than 3m/s) and bad config, - it did some crazy turns before stalling, when stall recovery kicked in, it reduced the roll movements, but never got the speed up (half of the stall prevention is to increase thrust, … you had already 100% to barely reach ARSPD_FBW_MIN 40)
I guess it’s badly tuned as well. (or something loosened or changed on the airframe, causing extra drag)
Anyway , it’s not a complete in depth analysis, I just do it for free.
Hi Andre,
Thanks for the inputs, brother.
I really appreciate your experience. The same aircraft in the same configuration followed the same profile but without this unintended left turn. The earlier flight didnt have any failure as well.
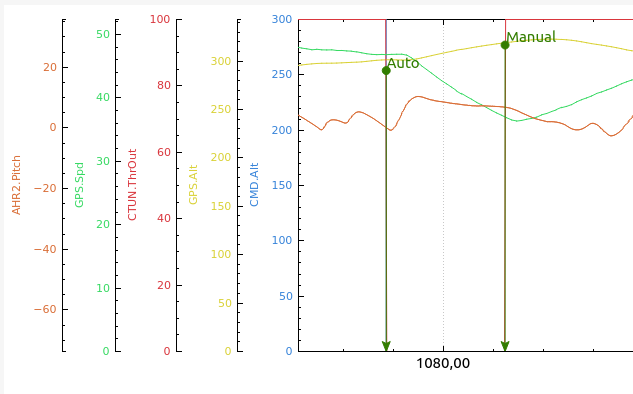
Meanwhile i had another issue with the same airframe (Log attached). When i switched to Auto, the FC put the throttle to zero instead of 100%.
The FC had the same flight parameters as the previous ones.
at the point AUTO was engaged, the pitch were about 0°, altitude were higher than the waypoint (>300) , then , shortly after, pitch were rised 10° and altitude increased even more.
Then the pitch were slooowly lowered to 6.8° over next >5 seconds , and then manual control mode selected.
as there is no RC log , and STICK_MIXING is 0 , so this alone is a sign of bad setup, where AP has clearly too little authority over control surfaces.
The FC would have sensed that the speed and altitude are dropping (due to throttle going to zero), tried to pitch up without success in maintaining altitude. Further when it was impposi ble to maintain speed, the FC commanded pitch down to increase speed.
Atleast this is what i infered😅. Nevertheless I agree that the airframe is not tuned properly.
But the important question is why didn’t auto throttle engage throttle to 100%
“why didn’t auto throttle engage throttle to 100%” most likely because both GS and ALT were over the required, and still increasing, (so why increase throttle)
Normally TECS would spend some of that potensial gravitational energy from level off and sink to target altitude, rather than apply more throttle, but it was very slow to change the pitch.
There are more than a few issues to fix with that plane, and so I do not go in depth of every aspect of it at once.