Hi all!!
I had a Transmitter and Receiver comm and Failsafe error which resulted in Hexacopter Drone Crash.
The Flight controller was Pixhawk 2.4.8. and Transmitter was Flysky FS-i6x, Receiver: Flysky FS-ia10b, All time communication was PPM signal.
PREFLIGHT: The calibration was successful, Radio channels were assigned and working properly and the flight was done in Valley
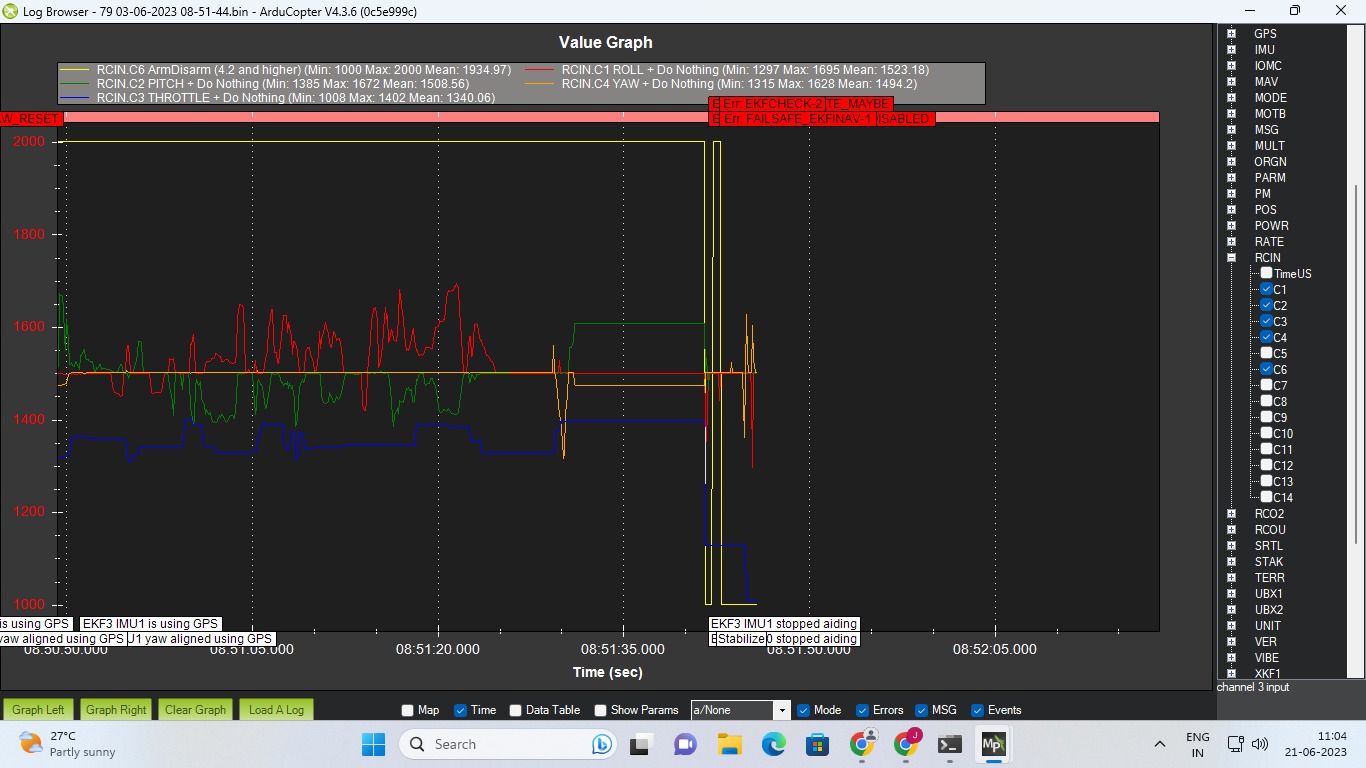
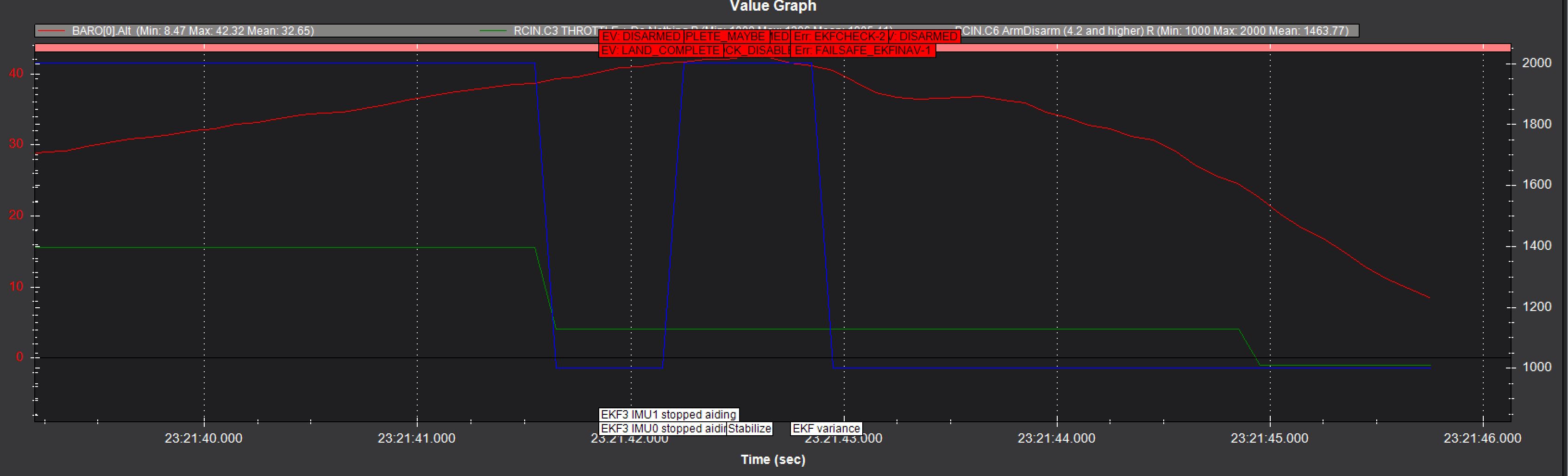
1st Flight of the drone was successful. During 2nd Flight, at the max. altitude before the failsafe was 20m, then communication was lost between Tx and Rx so the Failsafe has triggered as well an Error in Failsafe occurred. Here in DataFlash Log, EKF3 IMU1 stopped aiding and a FAILSAFE_EKFINAV-1 error is generated.
During Flight after failsafe, the drone gained altitude again connected to Tx, and went into Disarm mode. Therefore Drones fall.
To rescue the falling Drone, the Pilot manually changes the mode from Arm > Disarm > Arm through a switch stick on Tx. The Drone got armed but due to Gravitational inertia, the drone crashed.
I can’t understand, 1) why it got disconnected with Tx, 2)why it gain a certain altitude 3) whether it was a glitch in Pixhawk or signal interference. 4) and how to resolve the issue.
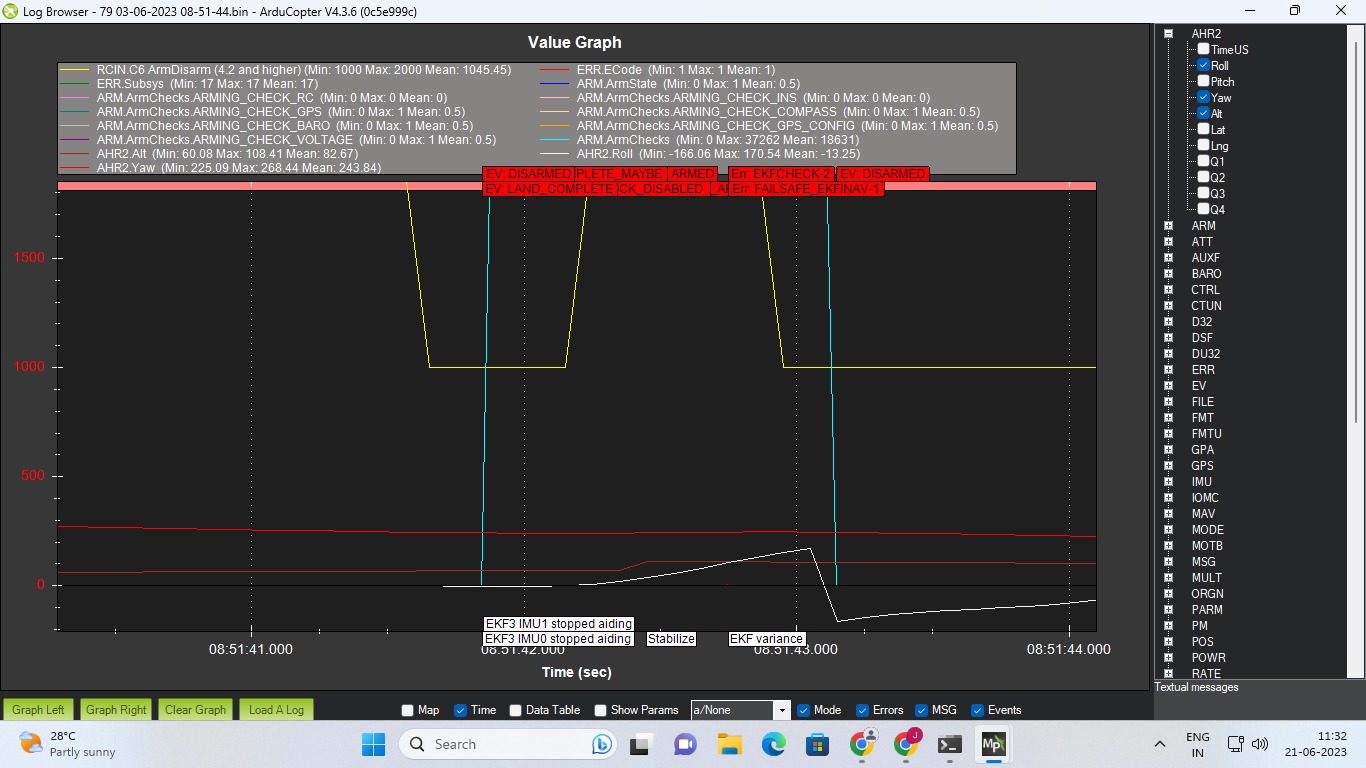
All I see is a climb to ~40m, with no FS preceding it, the Disarm switch was toggled low/high/low which disarmed/re-armed/disarmed. Throttle was dropped also and it was in Stabilize. Rapid Return to Earth.
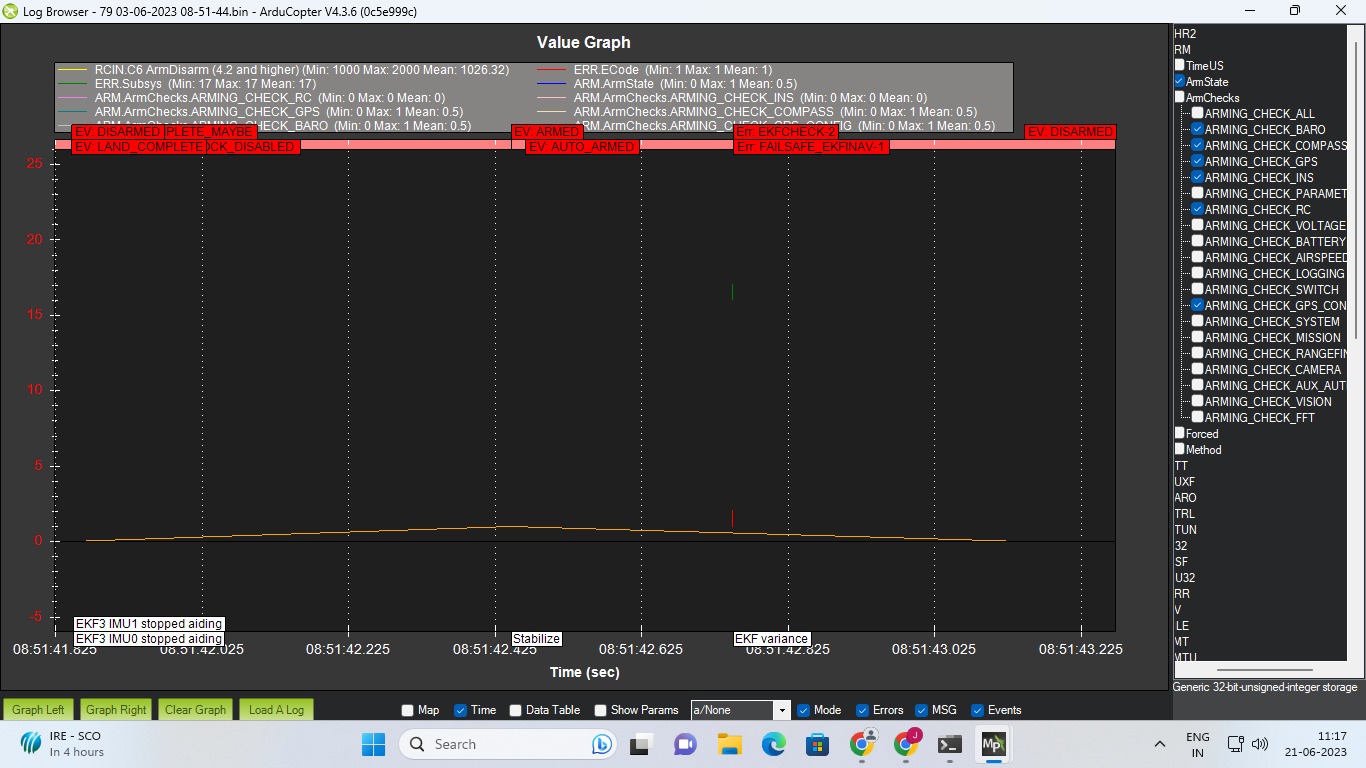
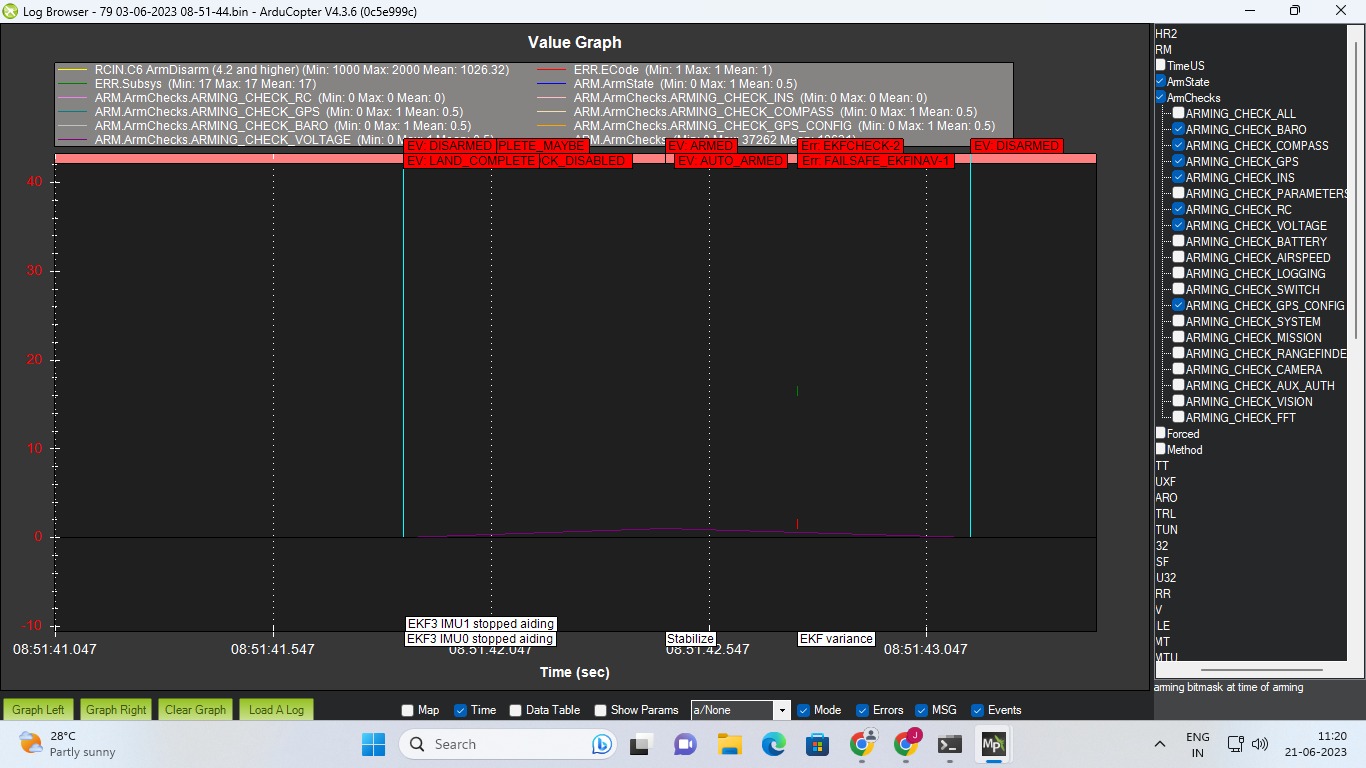
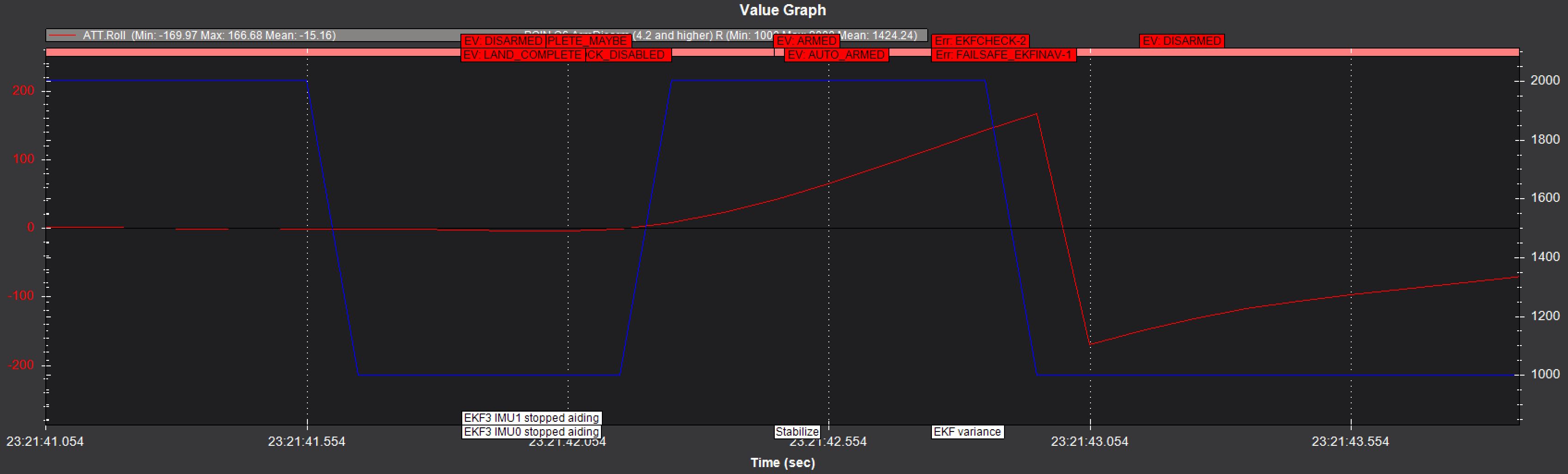
Those EKF FS’s happened after it was re-armed because it was rolling over.
then why EKF IMU0, IMU1 Stopped aiding after first disarm? since, manually pilot didn’t disarm the Hexa through transmitter. was there any external/Internal signal interference or EMF Interference respectively ?
This indicates the likely root cause of the crash. Disarming in flight is a very poor first instinct when things start to look or feel “wrong.”
There is no indication of RC signal loss, so it appears to be misperceived lack of response followed by pilot error to disarm, resulting in loss of thrust (motors stopping) and crash.
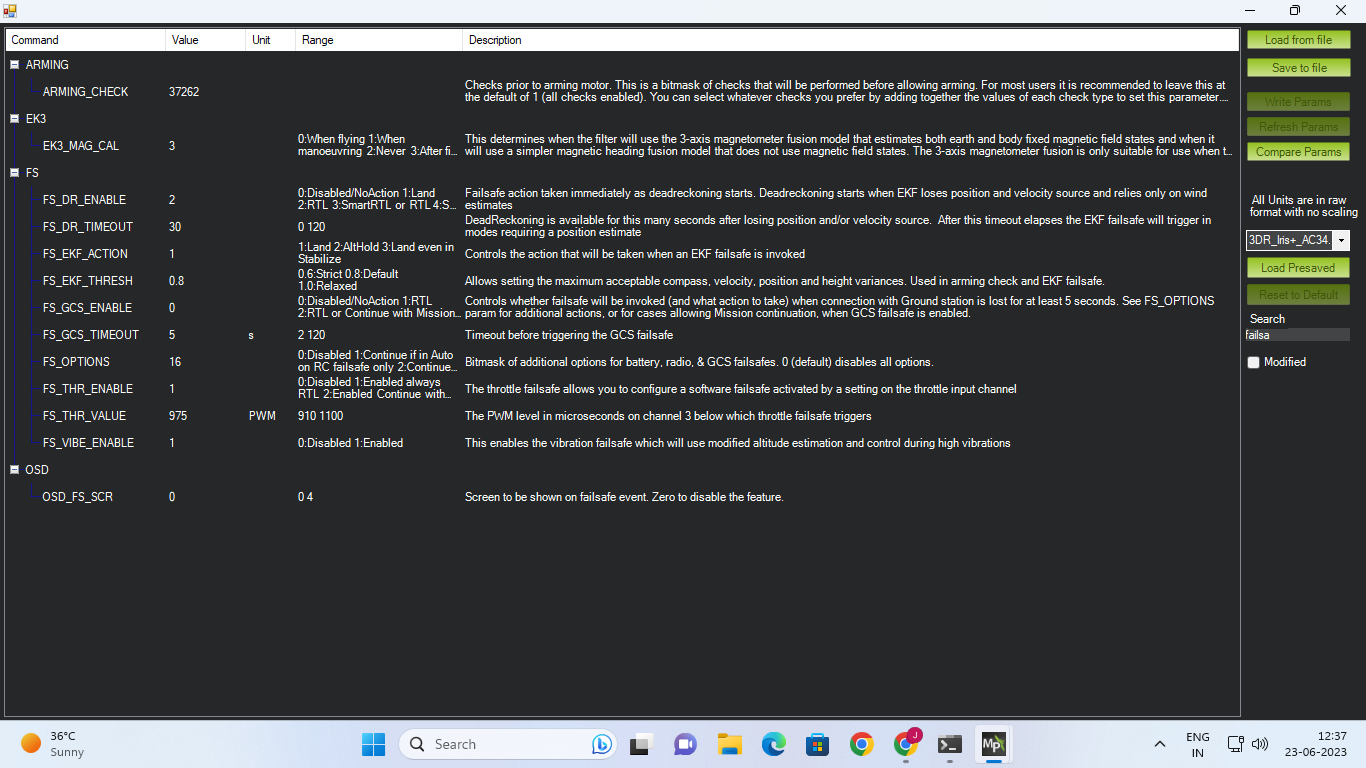
after signal loss the failsafe wasn’t triggered and gained certain height automatically through the last received data from transmitter and how to remove the 3 sec arming delay from parameters? in Mission planner.
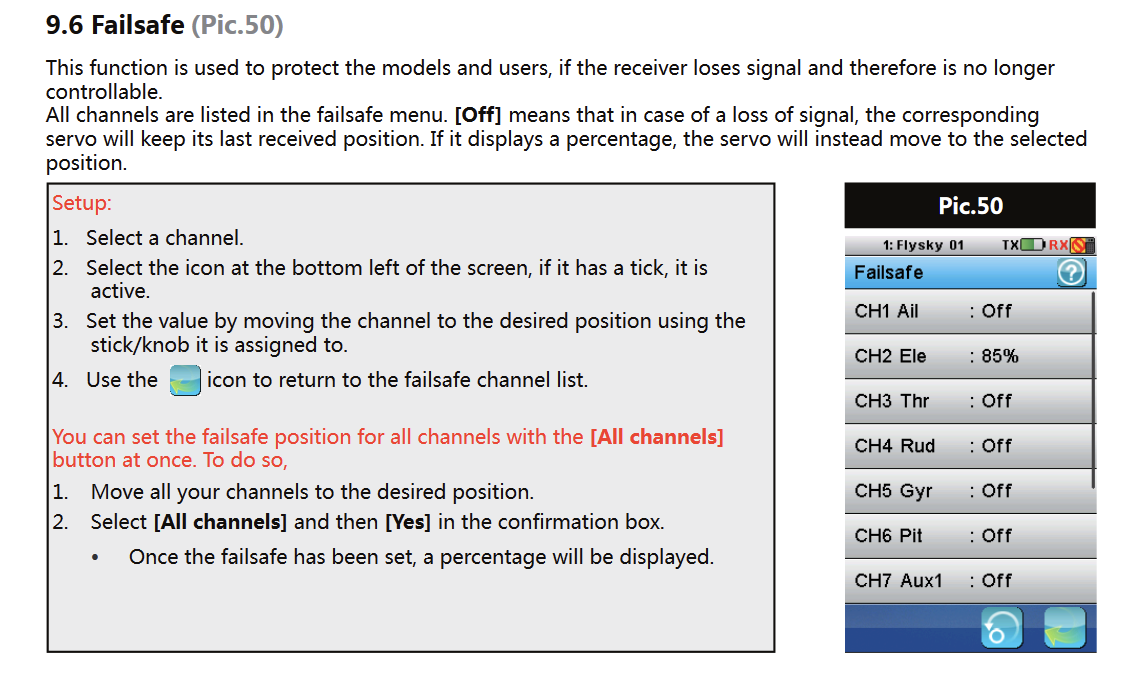
This is another one of those receivers that needs to be bound WHILE all channels are in the position you want during failsafe - you need to set your throttle trim on the transmitter way down and lower the throttle stick THEN bind with the receiver, then set your throttle trim back to normal.
If any other channels are in the “disarm” or some “drop from the sky” position during binding, then you need to fix that and bind again.
See the pic from the manual, below - note that “OFF” doesnt mean output no pulses, it means dont change the PWM value.
Personally I would get a receiver that can be set to output no pulses for failsafe and uses SBUS.
If you transmitter doesnt support any of those things, then I would change that too, bring it up to the year 2000’s