Hello everyone,
We developped an octocopter of around 10kg take-off weight and we now face a big issue for the second time : a crash of the copter occures due to a massive overshoot on roll (first crash) and Pitch (second crash).
Drone specifications :
- X8 frame, arducopter V4.0.3 Octa Quad
- Pixhawk 2.1 standard set, cube black, GPS Here+ GNSS (RTK version)
- ESC : T-motor Flame 80A
- Motors : T-motor U7 V2.0 Kv420
- Main pdb supports up to 200A continuous and up to 320A peak
- Current sensor : Mauch PL200
- BEC pixhawk Power : Mauch BEC 5V
- Receiver : Frsky X8R
- Propellers : T-motor Carbon 18x6,1
- Batteries : 2xGens Ace tattu 6S 12000mAh 15C connected in parallel.
This drone was developped 7 years ago and never faced this issue before. First problems started on April.
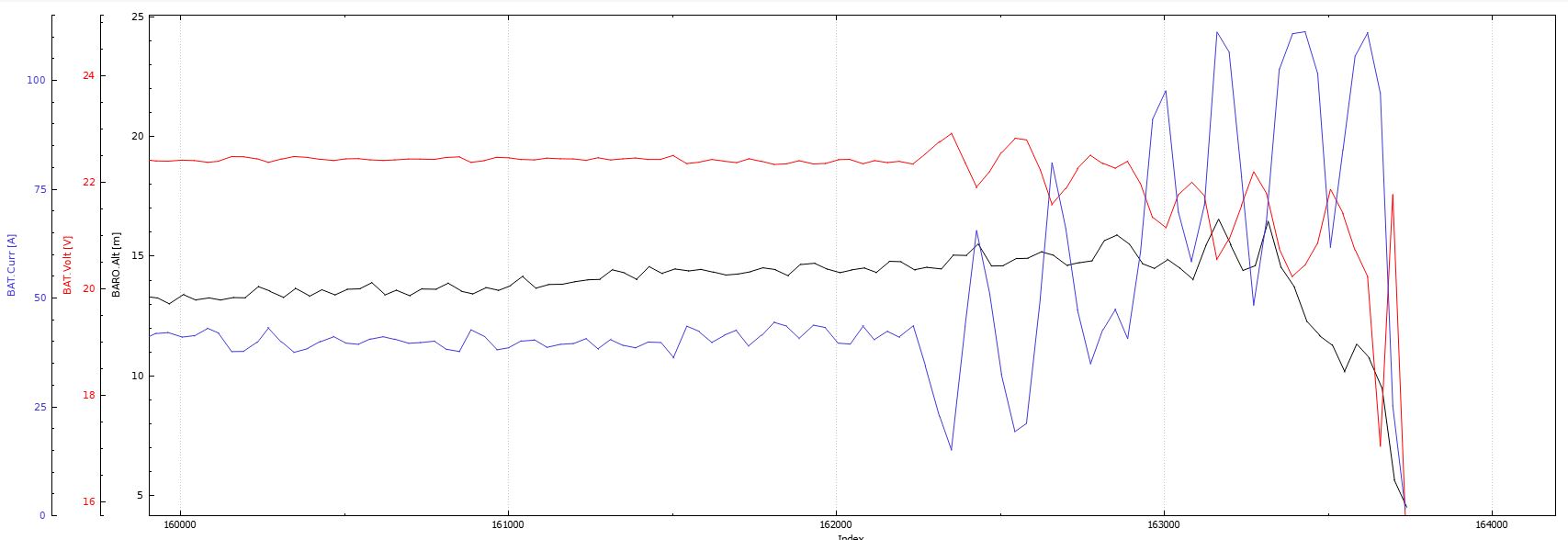
1st crash happened at around the 7th min flight time during a loiter evolution. No payload on the drone. Suddenly the drone had an over reaction on the roll axis that led to a crash. (find logs attached). Pids were default (Roll/Pitch P: 0,135 and Yaw : 0,180 etc) and ATC_RAT_RLL_FLTT, ATC_RAT_RLL_FLTD, ATC_RAT_PIT_FLTT, ATC_RAT_PIT_FLTD were set to default 20kHz. The drone flew quite well before the crash.
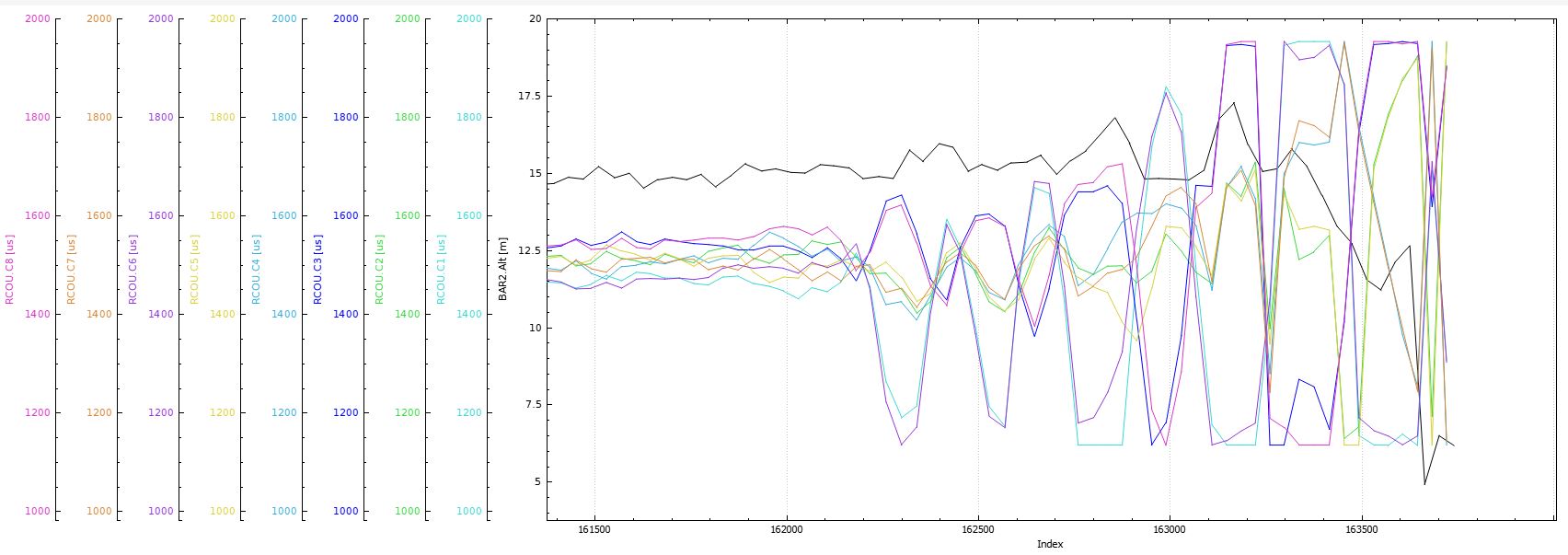
When I looked the logs I noticed vibration when graphing clip 0, clip 1 etc, but don’t think that it could cause such a reaction. The pixhawk was mounted on foam furnished with the pixhawk set. But then second crash is more interesting.
2nd crash happened on the 4th flight. First flight was around 15min without payload. Pids were default and ATC filters set to 10kHz as it is recommended for large copters. Pixhawk has been attached using screws on the frame, resulting less vibration as shown on the logs. On the 2nd flight we added a gremsy S1 gimbal with A7R camera. The drone flew well but wasn’t compensating enough so we decided to increment Pids to finally reach :
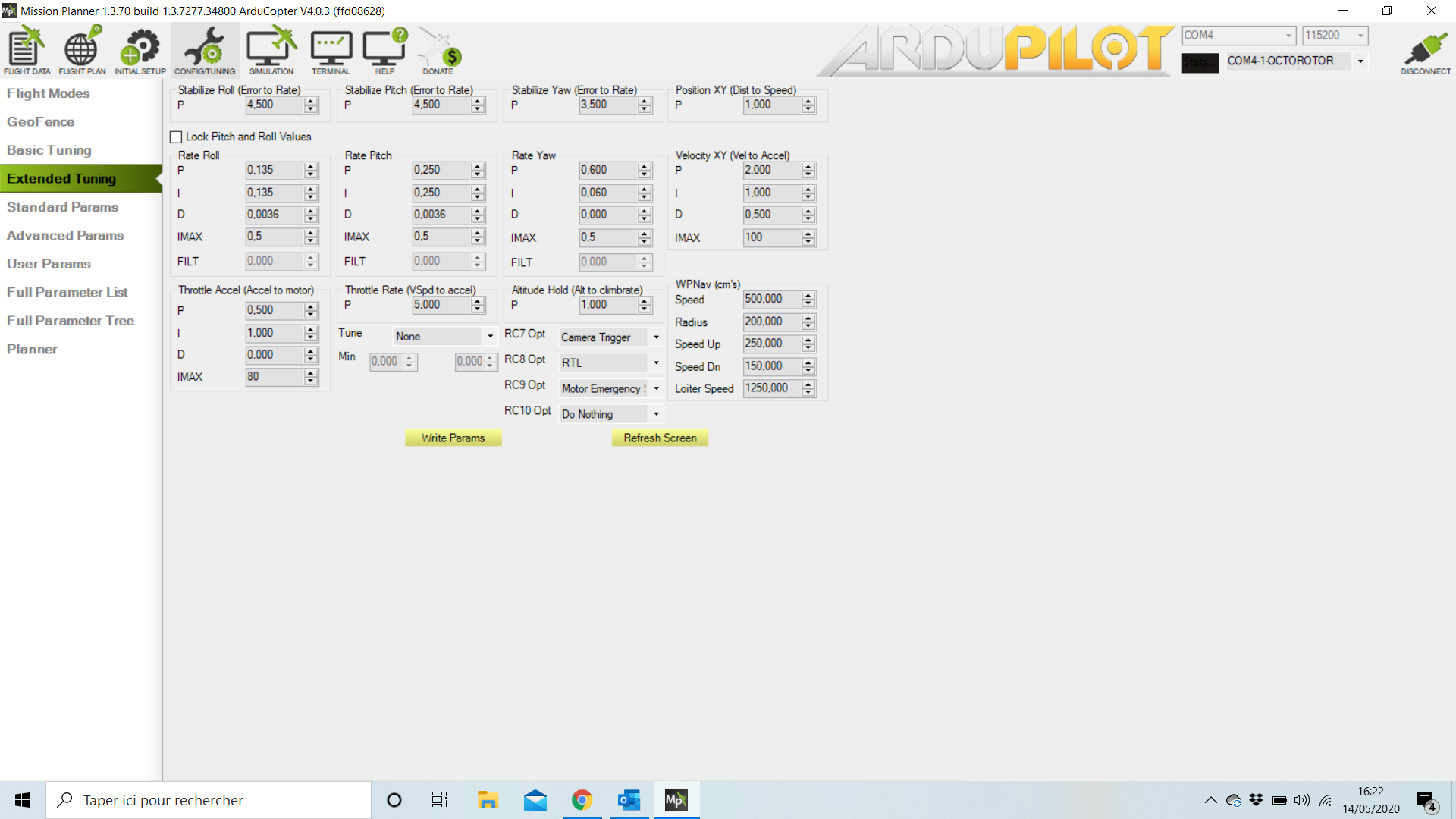
The drone had really better Yaw compensation. Then I tried to give orders on roll to test reactivity and compensation. Results were satisfaying, until I tried on the Pitch axis. Immediatly it over reacted and crashed. See video attached : https://www.youtube.com/watch?v=xuQxxJfLcJY&feature=youtu.be&fbclid=IwAR3omAldzNdqa3YnVYzDKIreXaDhR5YDvbAy4O_5vwpJhPhFiyGE3XmrqvA
I was in Althold mode.
When I graph DesRoll and Roll in logs the overshoot is really visible but we can’t understand this reaction. Any ideas ?
regards
Elie de Fonclare
Logs : https://drive.google.com/open?id=1gOwZDYm3CMQZMm0cXDAadOTXAbGmaW08