My quad suddenly lost control and crashed during a flight in stabilize mode. I was attempting to get data for MAGFIT cal.
I got the Err: GPS multiple times leading up to the event and Err: EKFCHECK-0 and Err: failsafe_ekfinav just before the loss of control.
NSats and HDop seemed acceptable throughout the flight. (6-8 sats, and <2 Hdop). Don’t think this matters anyways b/c GPS is not used ins stabilize mode.
Attitude control also isn’t the best (especially in pitch) as I’m testing a novel vehicle configuration that was difficult to tune.
Any thoughts on root cause here would be much appreciated. Should I try another flight with the magfit offsets or is there another issue that needs to be corrected?
The copter loses (mostly) pitch control for no apparent reason??
When comparing RCout and ESC RPM, they match very closely for the whole flight right up until the last 4 seconds. Then ESC RPM outputs seem limited and FC demands are not being met.
All ESCs report the same temperature and it does peak around 90 to 92 degrees. Unfortunately I cant confirm of the ESCs were doing some output limiting based on high temperature, there’s no error reported.
If you have this BLHELI setting Temperature Protection = 90
then maybe set it to 95
You GPS number of sats is low (poor) and HDOP is also poor - so I wouldnt go disabling the compass anytime soon or you will be without any reliable heading.
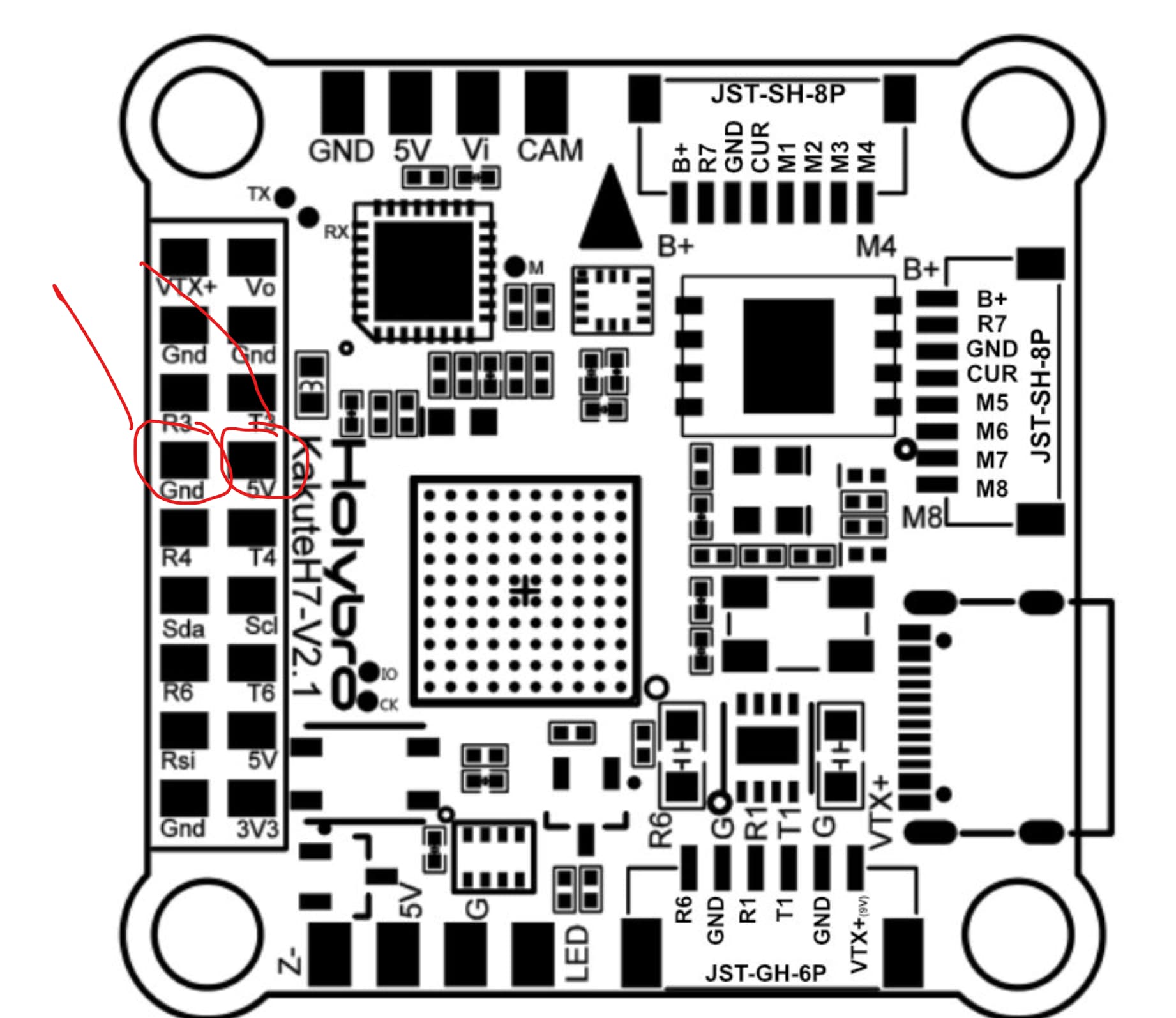
You have the GPS connected to Serial4, just set SERIAL3_PROTOCOL,-1 so that port is ignored and logically your GPS will become GPS1 instead of GPS2.
And set these:
GPS_GNSS_MODE,67
GPS_GNSS_MODE2,67
If the GPS unit still has a low sat count and poor HDOP (>0.8) then interference or supply voltage could be an issue.
Sort all that out then go back to doing a test flight to better calibrate the compass.
Thanks for the suggestions, @xfacta . Do you suspect that a BEC (step down from 24V to 5V) or a servo motor near the GPS/Compass unit could be the source of interference? GPS/Compass unit is away from the ESC power cables and I have shielded the GPS cable.
I’ve got an RF meter coming in the mail that I will use to track down the primary interference source, but curious to get your input in the meantime.
It could easily be, some of them are noisy and could do with extra filter caps on the input and output - hard to know without seeing it and maybe some tests.
have you got a web link to the BEC?
Also check the Vcc (5 volts) from the “power brick” to the flight controller - it should be between 5.1v and 5.3v . Most cheap/old power bricks can benefit from extra caps on the output too. You flight controller doesnt measure the Vcc so I cant tell from the log.
Also check the supply voltage to the GPS, this should be up around 5.0v . If it’s low the GPS units can perform poorly.