carporu
October 18, 2021, 4:24pm
1
Hi all!
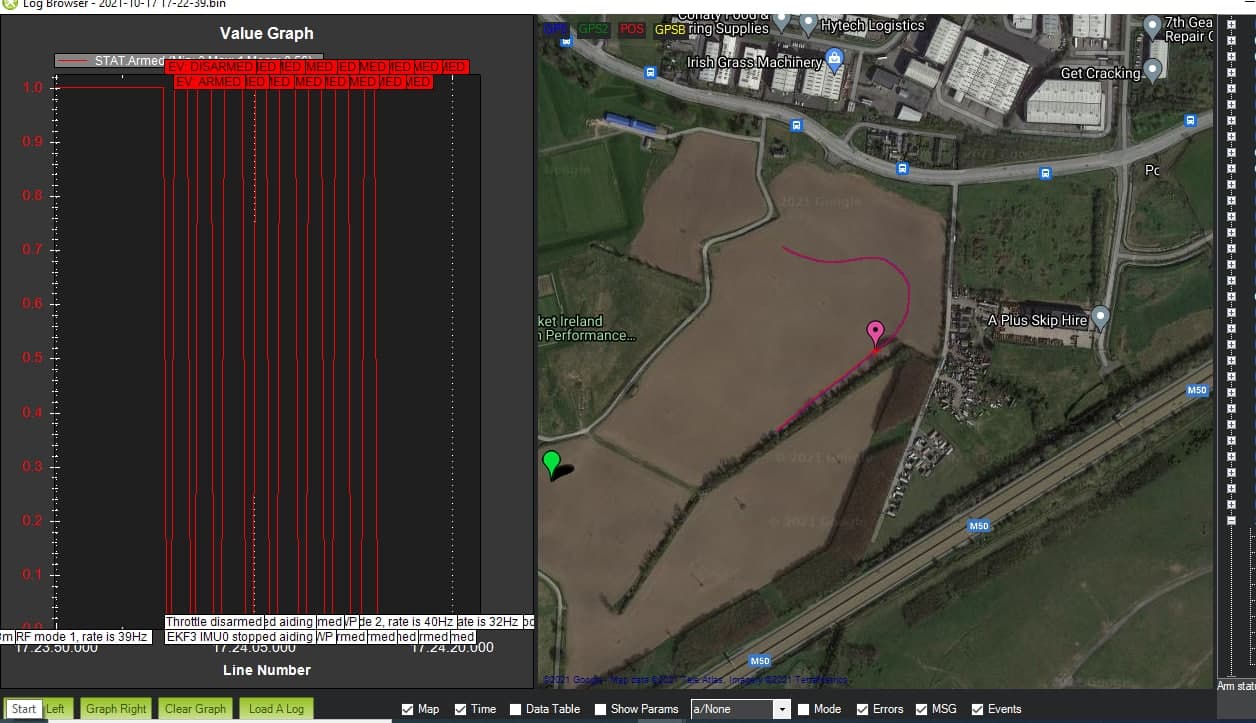
I managed to land it but I don’t want it to happen when I am further away.https://fromsmash.com/Arduplanelog
The home and altitude got reset to that point also instead of the original (take off one) which is also strange…
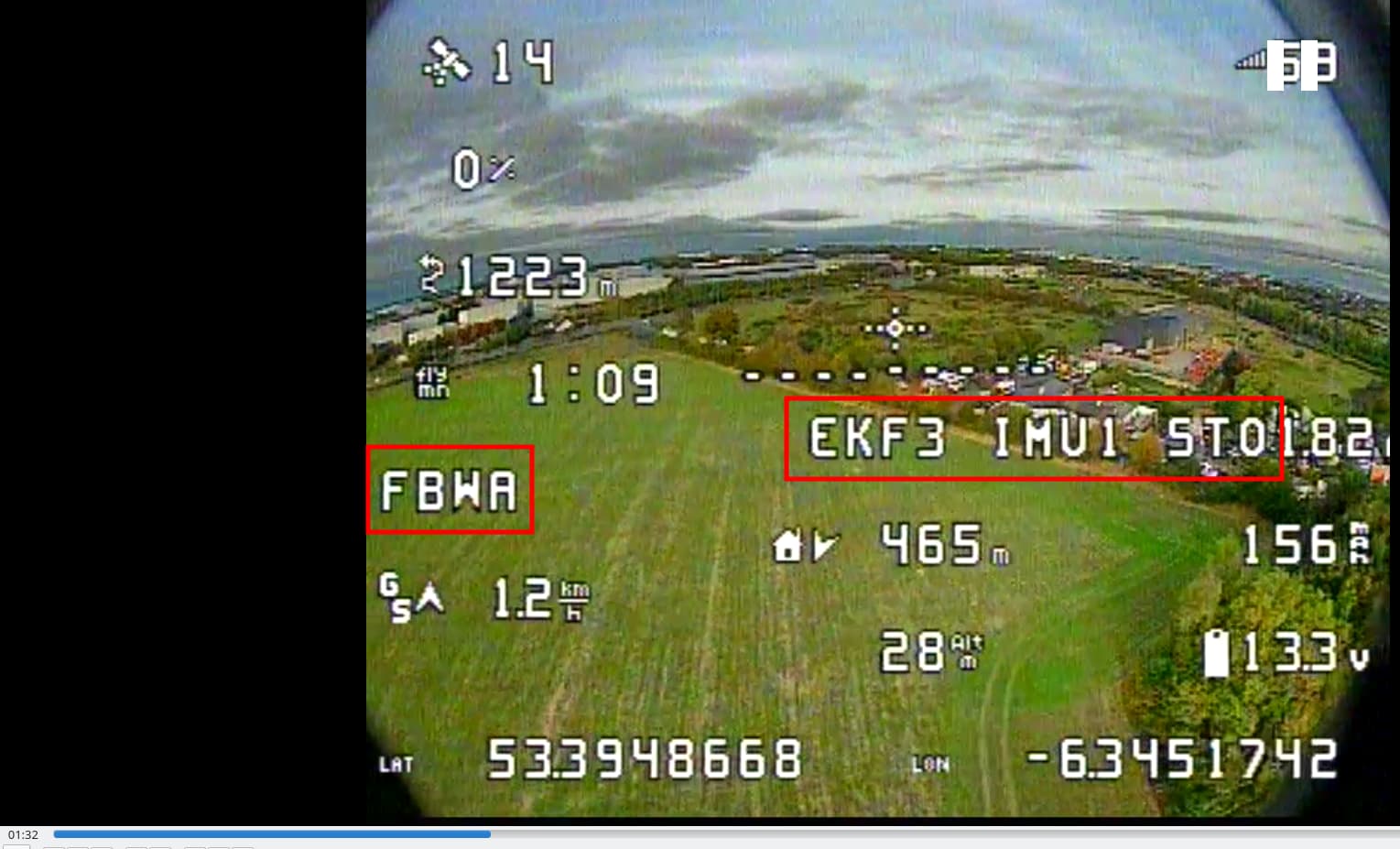
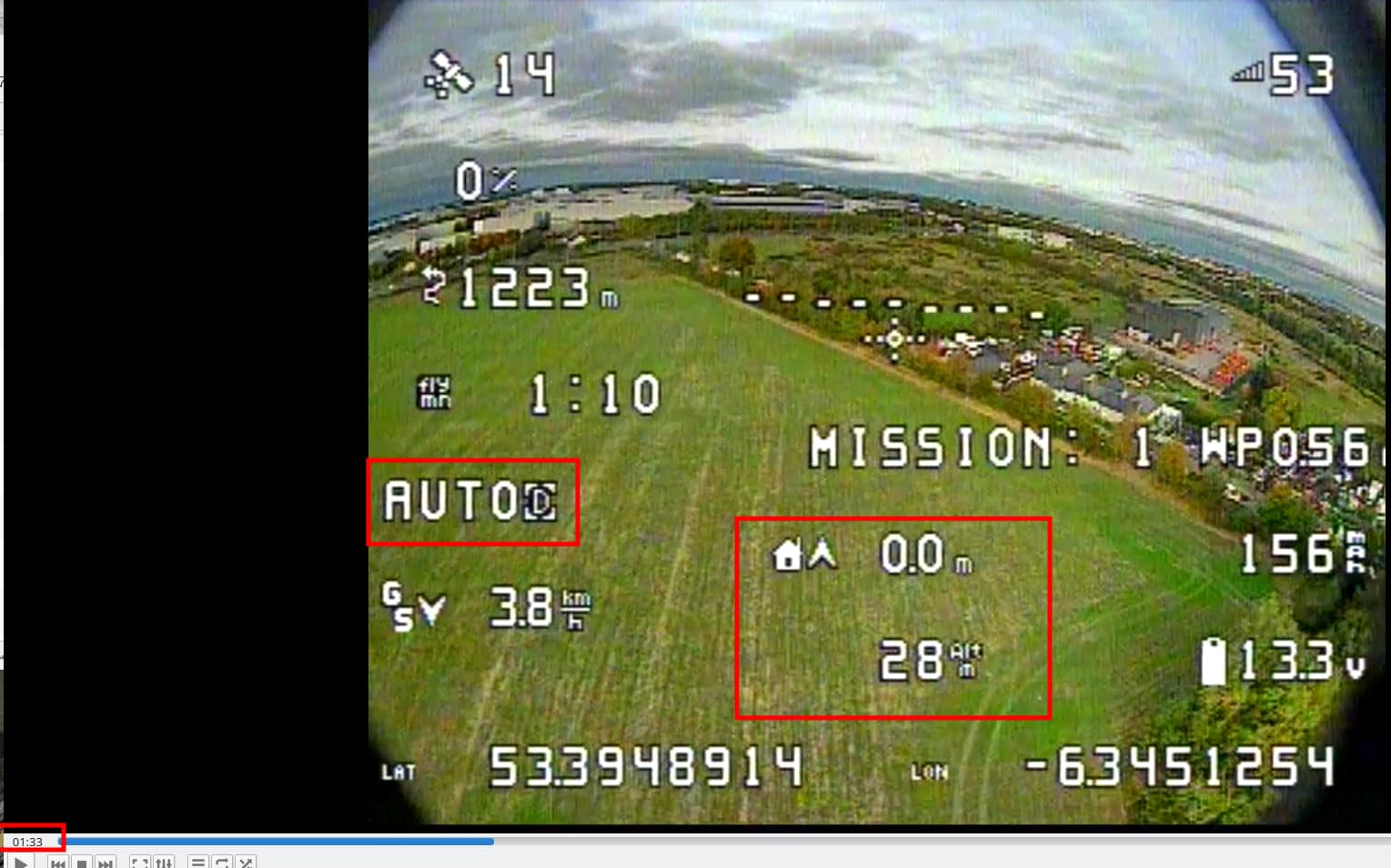
Before the issue:
During the issue, the Mode switches to FBWA from Auto:
After the issue:
and I change to FBWA manually and then I get the throttle disarmed/armed message:
I can upload the DVR if needed.
I have been reading and it seems that it is an issue with the compass (but I have it disabled, connected but disabled) or with the accelerometer (but it was flying well until then)
Thank you in advance
Eosbandi
October 18, 2021, 5:56pm
2
Your RC control looks fishy, plane disarmed because CH5 changed value…(and Ch6 and Ch4 as well at the same time, so it was not pilot initiated…)
carporu
October 18, 2021, 6:07pm
3
Hi! @Eosbandi
Eosbandi
October 18, 2021, 6:17pm
4
First of all change to 4.1.2 released code asap, then if it still does not work, try your luck with TBS.
carporu
October 18, 2021, 6:18pm
5
okay, understood! I can do it without losing the settings?@Eosbandi
carporu
October 18, 2021, 6:26pm
7
Awesome!
Mfoo
October 19, 2021, 5:54am
8
Make sure you use a serial/UART with DMA enabled on RX and TX!
carporu
October 19, 2021, 7:35am
9
Hi @Mfoo
Mfoo
October 19, 2021, 8:10am
10
Hi.
carporu
October 19, 2021, 8:39am
11
I’m using Matek F765-Wing
Mfoo
October 19, 2021, 9:06am
12
The use SERIAL2 which is UART1.
carporu
October 19, 2021, 11:03am
13
okay, I’ll check, thank you
carporu
October 19, 2021, 11:35am
14
@Mfoo which option is it?
Mfoo
October 19, 2021, 11:49am
15
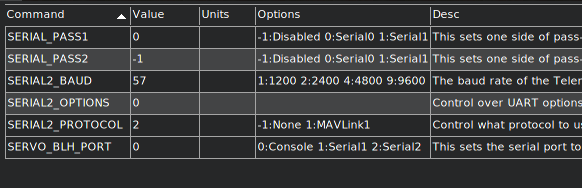
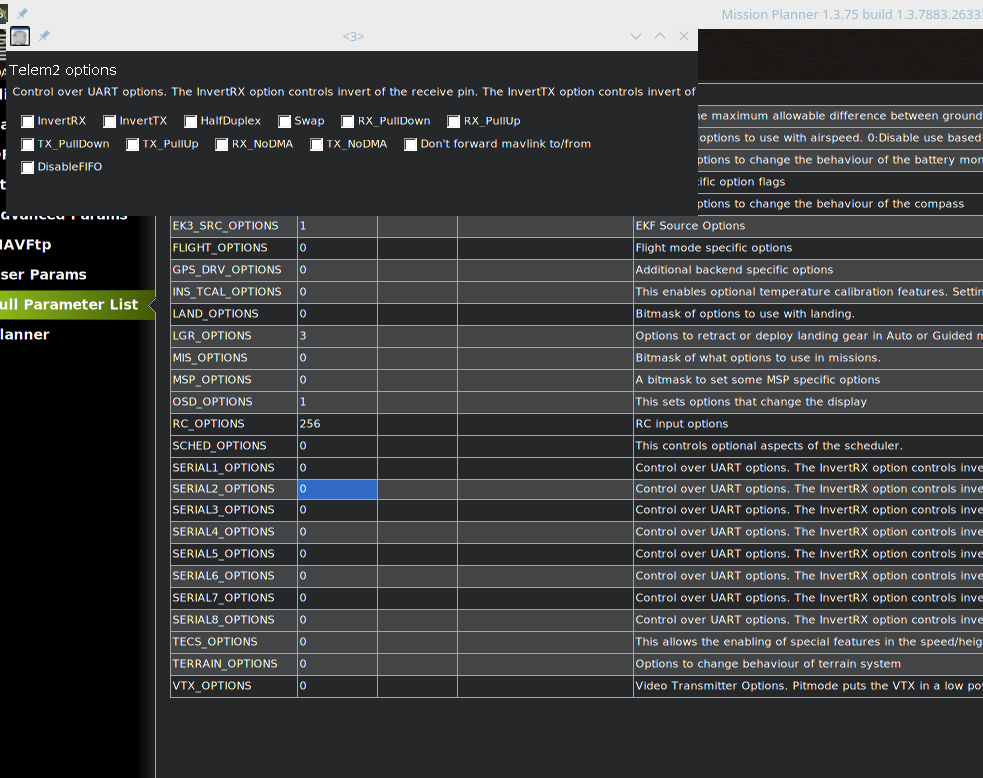
set SERIAL2_OPTIONS to 23
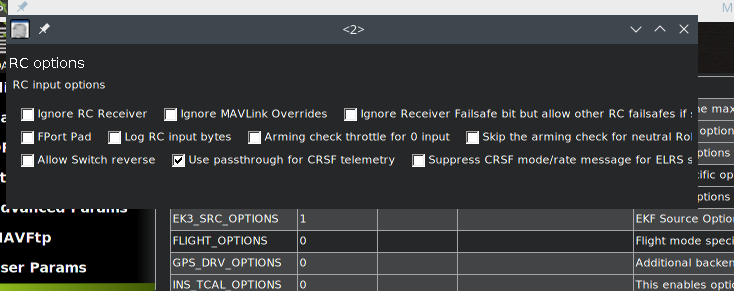
You can also set RC_OPTIONS to 288 to get telemetry passthrough on your remote for Yaapu script for example.
carporu
October 19, 2021, 12:48pm
16
Thank you @Mfoo
the other serial options seem to be 0
Also, I am using Yaapu with CRSF telemetry at the moment, I’d like to keep using it
My RC_OPTIONS at the moment is 256
Mfoo
October 19, 2021, 1:20pm
17
SERIALn_OPTIONS dont take affect iirc. Same as SERIAL_BAUD. That is fixed on CRSF to 400k.
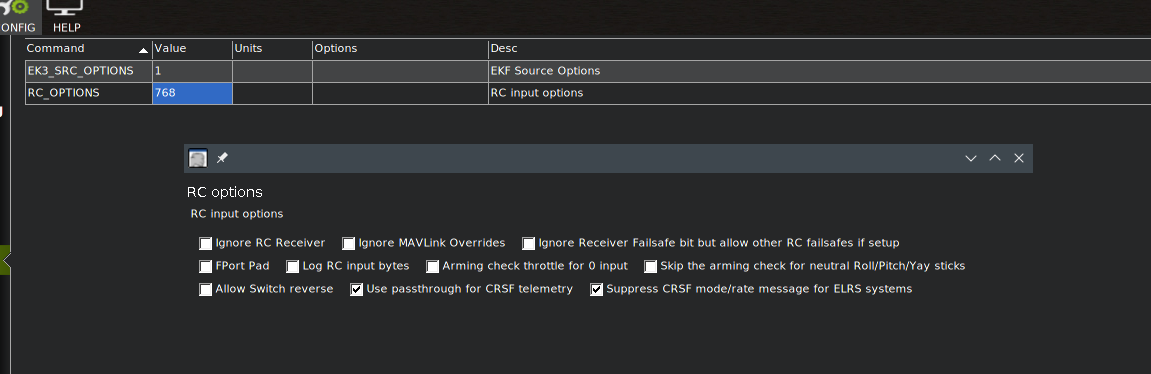
Me personally uses RC_OPTIONS 800, which is passthrough and suppress CRSF messages for RFMD and rate changes.
carporu
October 19, 2021, 1:55pm
18
thanks @Mfoo
Is this correct?
Mfoo
October 19, 2021, 2:30pm
19
Yes, thats correct.
But if you dont like that 256, or 768, is fine.