I have flown with a pixhawk 2: black cube for some time with APM:Copter 3.5.0 RC4.
Everything was working fine until I upgraded to the latest ArduCopter V4.0.3.
If I take off in Loiter or Stabilise and keep the quad at a hight of a few meters it is not staying steady and crashes by falling to one side (it does not stay leveled). can this be a difference in the newer software? Nothing else has been changed.
Good day, the code of 3.5.0 is different by the 4.0.3. You must consider that now ardupilot firmware have Chibios and its different from Nuttx.
After the upgrade better perform all the calibrations needed
I still have not been able to solve the problem. I installed the latest arducopter and did recalibration Step by step but it still crashes just after take off.
@Supersurfer
yes, it also comes down to me. When I look at the PWM signals with the mavlink espector and the servo output raw through qgroundcontrol, different signals go to all of them. the problem occurred with software update
@kadir_yokus, @Supersurfer PLEASEEEE Post a link to the .bin log file, and provide a few other details about the frame, ESCs, motors, props and battery.
hi bin file is on the link.
The component information used is as follows.
Motor: EMAX MT3515 650KV
ESC: BLHeli 25A
Propeller: 13 * 4.0 Carbon Fiiber
Frame Size: 700mm
Battery: 5000 mAh LiPo 4S 25C
OK, you are on AC 4.0.4-RC4. Any specific reason for that? You might be better staying with the latest stable release, 4.0.3
There’s no one thing wrong to easily fix, you need to do some of tuning work and maybe even some changes to the layout of your build. Please send a photo or two.
Issues I see:
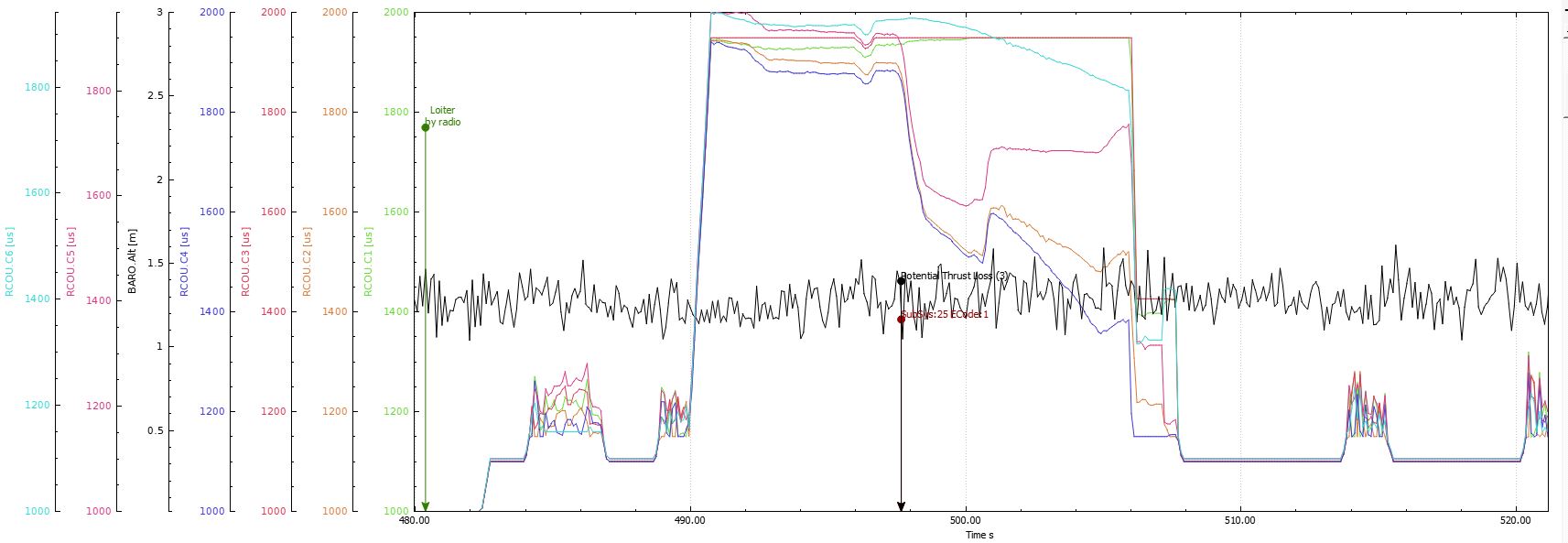
the barometer readings are very strange, as if uncovered and affected by propwash and maybe even light. On a 700mm frame 13 inch props shouldnt be near the barometer, so there’s something strange going on there. A Cube Black shouldnt be having this issue
You should definitely set up voltage and current monitoring
If you have a CAN connected compass/GPS module then set BRD_BOOT_DELAY,5000
I’d advise to run through the entire Accelerometer and Compass calibration routines again - wait for a good 3D Fix before you start
Use this helper spreadsheet to set some initial values - treat the “Suggested” values as mandatory.
I would advise DO NOT try to fly it until you’ve run through all those points or it will likely end in disaster.
You are using those ESCs with ordinary PWM (nothing wrong with that) - if you want to use DShot150 that would need a couple of extra settings, and your flight controller would need to have enough DShot capable outputs. We can come back to that after you’ve got everything else sorted.
@xfacta Hello,
I just updated v4.0.3.
after the update i need to plug my battery into charge. I download a thousand after charging, I will forward it again. The PWM signals and photos from the last time I ran it were shared.
Without a .bin log from a flying copter we can not realy help you. My guess is that you have vibrations problems, but without a log, that is just a gues.