Hi,
My quadcopter crashed. It seems there’s something wrong with the altitude estimation. When I took off in AltHold mode, the motors became unstable, and then the copter suddenly ascended.
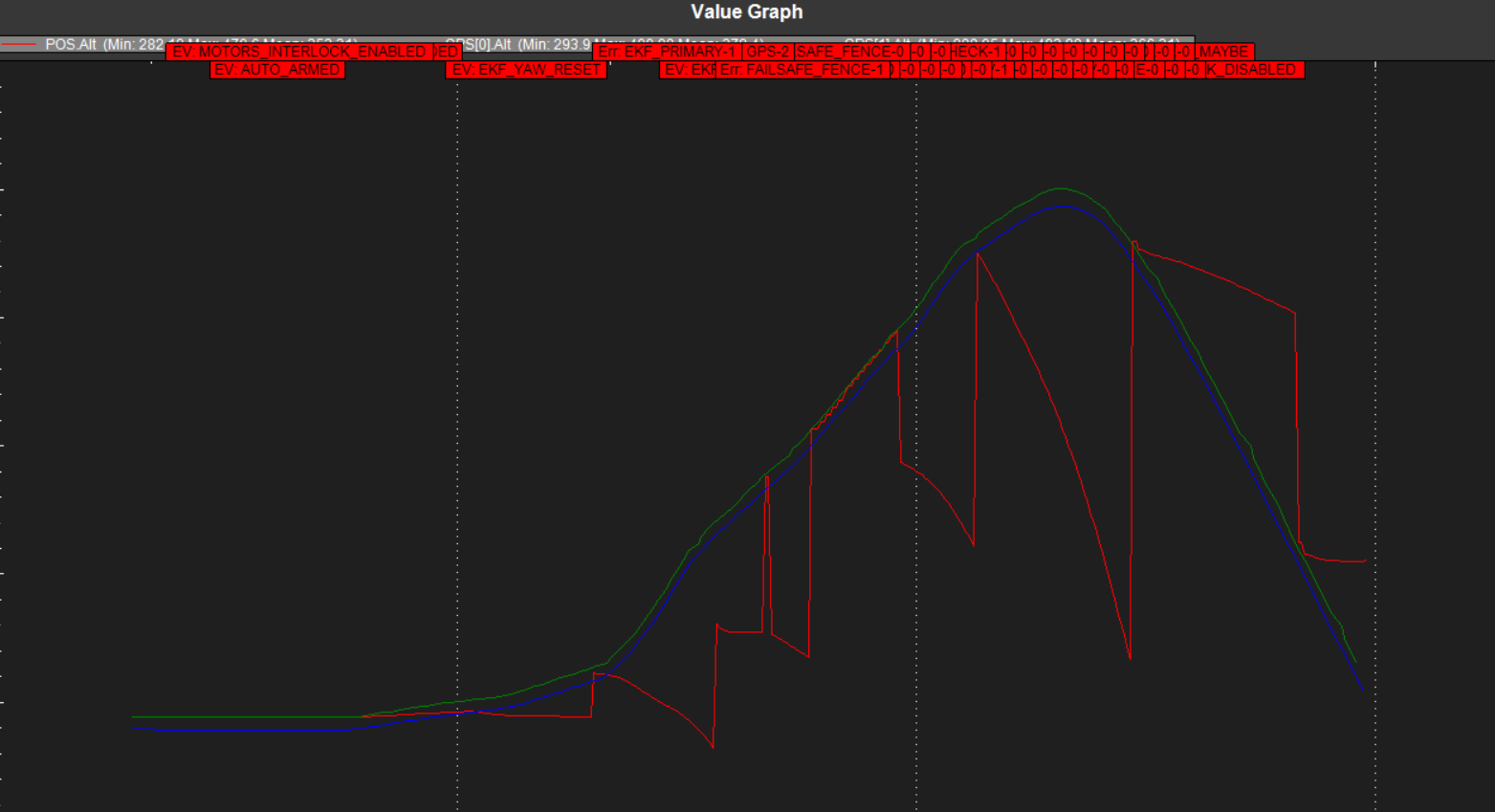
The following image shows three logs of altitude.
Could it be EKF divergence, or structural resonance caused by motor rotation?