Hi everybody,
Until today I’m flying with the ArduCopter 4.0.7
the drone was flying normally suddenly my data link shut-off and the drone execute RTL as a GCS_Failsafe. Everyething normal until the drone arrived vertical to the home position and the start the land phase then the drone goes left while losing altitude until it touched the ground.
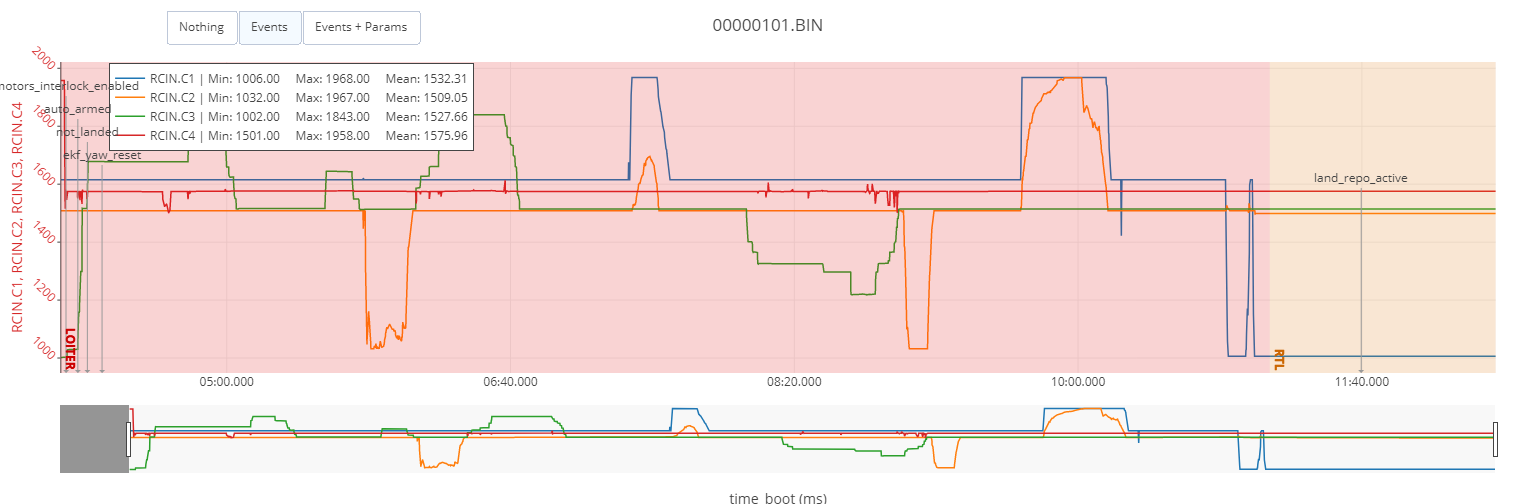
After analyzing the data log I can see that before the signal was lost between the GCS and the drone a Roll command was executed (that is normal because I was moving the drone in that direction) but when the drone comeback to home position and start landing then Land_repo_active was marked and then the drone execute the Roll and that what caused the crash
I succeed to make the Roll and Pitch ignored by the flight controller while landing by changing LAND_REPOSITION parameter, But my concern is how to do the samething for the YAW mouvement.
I can note that Im using joystick via mavlink not a RC transmitter.