Hi to all!
I need your opinion on this crash. I recently did a flight test with my Erle-Hexacopter.
With an application developed with python-dronekit I instructed the drone to take off (reaching a height of 3 m) and land.
However, the drone advanced about 11 meters from its starting point until it collided with a fence.
After that, the Mission Planner HUD shows the error “Compass Variance Error”.
Can someone please help me with this strange behavior? The flight logs are attached 51.BIN (92 KB).
Thanks in advance.
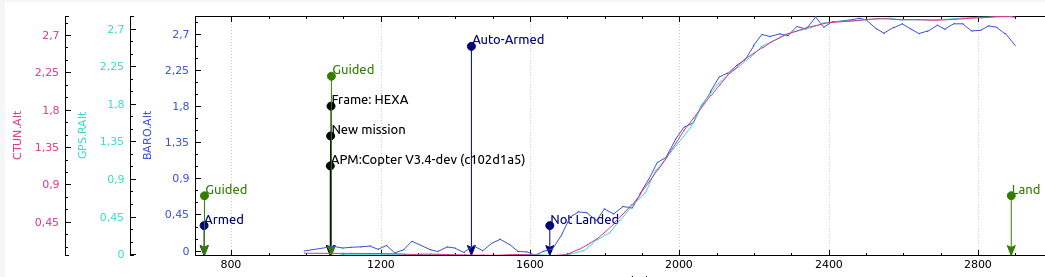
My first recommendation is to flash the flight controller with Arducopter 3.5.7 (latest stable build). 3.4-dev is what manufacturers put on new boards. 3.4-dev is OLD and it’s a DEVELOPER version…