Whilst descending slowly in loiter mode I raised the throttle to stop the descend and to go back up but my copter flipped/fell to the left and crashed. Luckily I was less than 1m off the ground at that point. I suspect that one of the motor bearings might have seized up because the #2 motor has gone stiff but it is also the motor that took a knock in the crash.
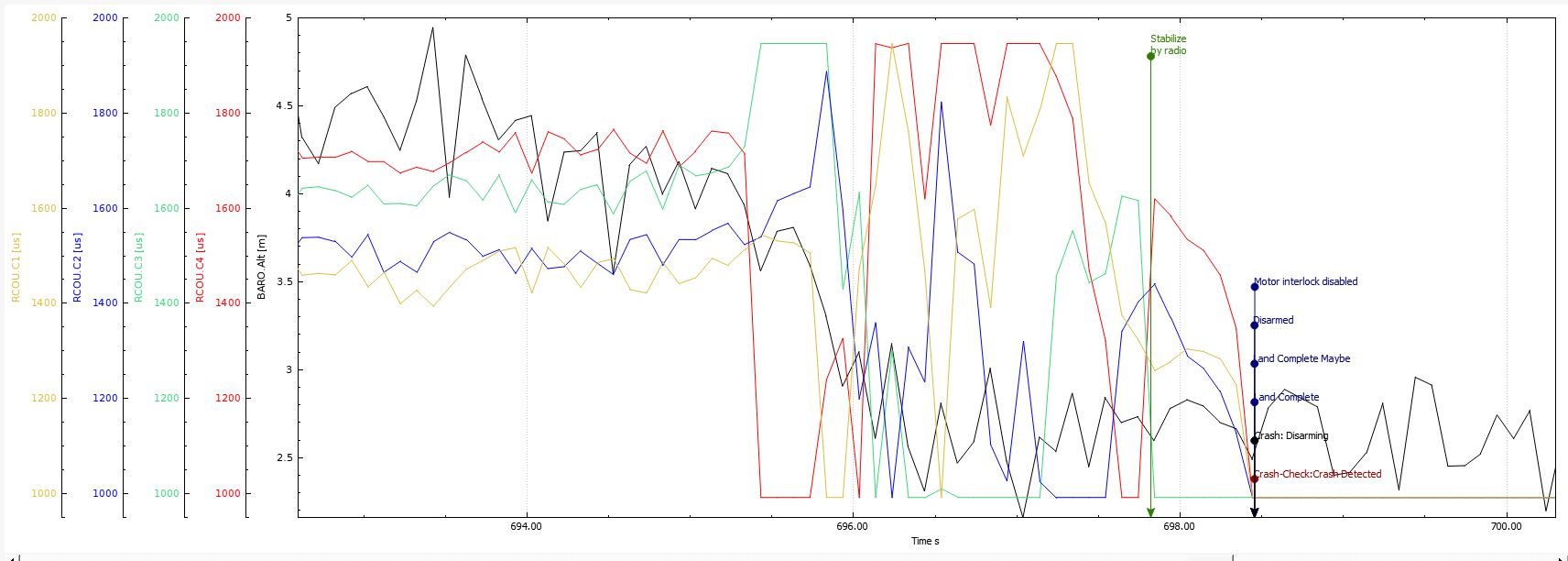
You had a loss of thrust on Motor 3 (command to max) which dropped the output to Motor 4 (command to Min) on the opposite arm. General lack of thrust and stability and down she went. So check ESC, Motor. prop on 3.
You also have a problem with a significant difference in Motor outputs at Hover. These should roughly overlay each other. It seems to be a combined problem of a yaw bias with the CCW motors being commanded lower and Motor 4 commanded very high. In all quite messy.
I’ve checked all the connections for motor #3 and I’ve even bench tested it and it’s all still fine. The stiffness on motor #2 was because the motor base got slightly bent from the crash impact and was touching the motor can.
I’ve noticed the #3 and #4 motors running higher than the other two yes but how exactly does one solve that?
This is usually a case of motors not being level causing a Yaw control bias. It’s seen often on craft with round arms where the motor mount or the arm frame mount is twisted.
Ok now I understand that. The motors has to basically counter the yaw torque and then account for the added imbalance which is why they are running higher.
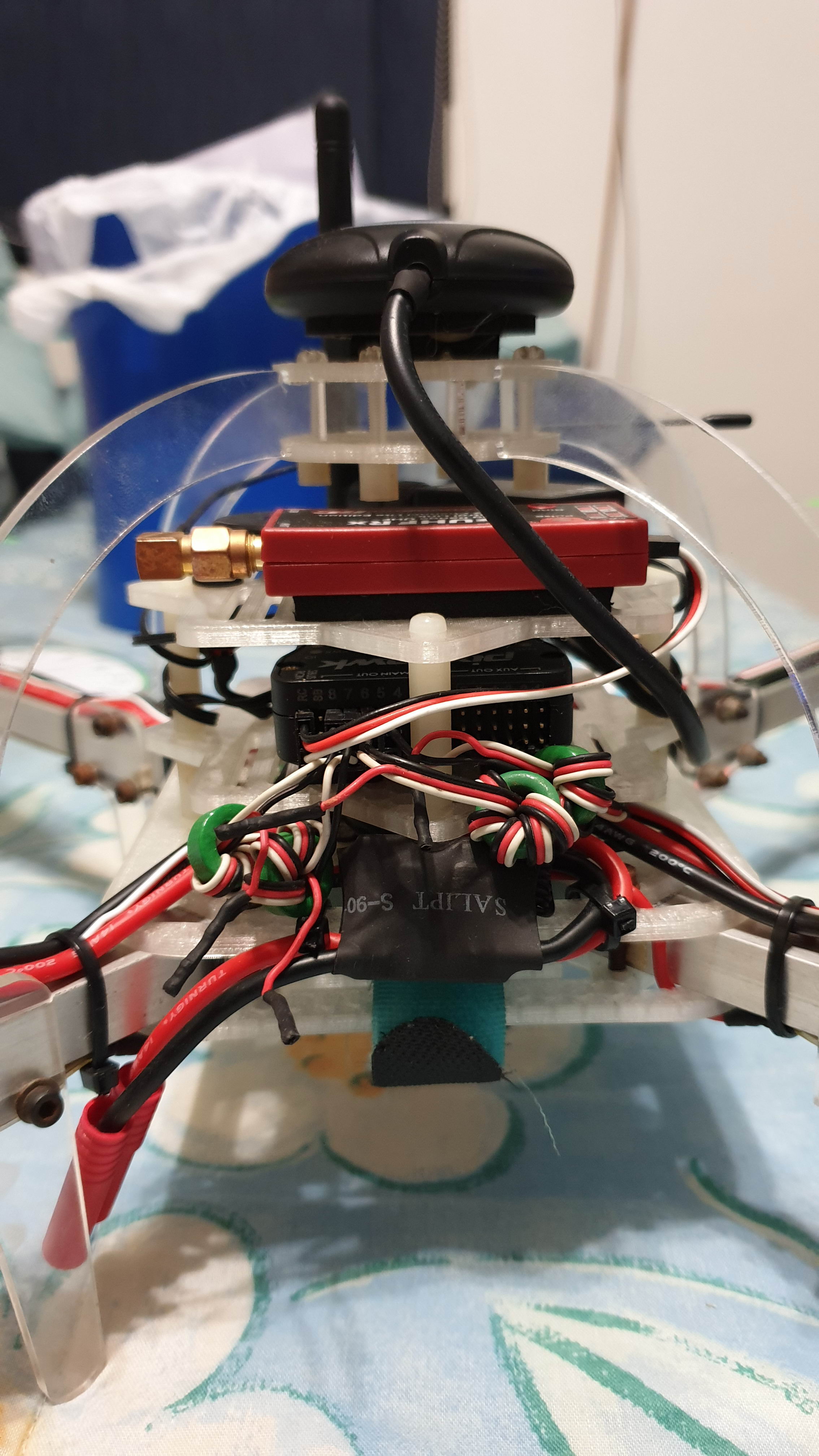
My frame arms are square tubing but I’m now considering rebuilding the whole thing following the crash. I originally built the frame in 2012 from laser cut perspex but I now have a 3D printer so I can reprint everything
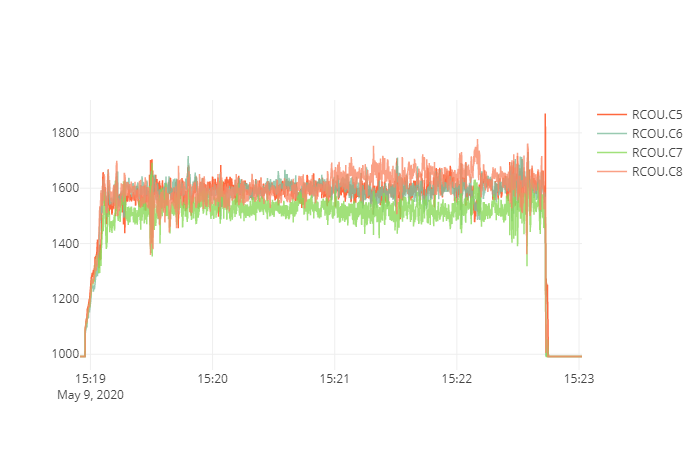
Please see the below RC outputs after I rebuilt my quad. These seem to be the best values I can get for motors 3 and 4 by placing a small spacer underneath motor 4 on the one side. I tried adding spacers to both motors 3 and 4 but it either has no effect or the values get worse…

 The stiffness on motor
The stiffness on motor