Looking for some help with a crash analysis on an octo-quad plane config. It was an interesting flight to say the least, but here is the big picture:
In Auto mode VTOL take off climb to 100m, transition to cruise flight where about 32 seconds after 100% throttle application the push motor goes into thermal protection and drops output to 60%. aircraft continues around the pattern as planned, losing altitude and airspeed, which we noticed and half expected as we had seen this issue before and where actively trying to find a good esc/motor/prop combo for this aircraft. Pilot tried to wait for the aircraft to come around to the upwind leg to detransition back to vtol, but it became apparent that the aircraft was going to run out of altitude before making it around and so the pilot sent the aircraft into qloiter mode after rolling out on base leg (left cross wind ~6knots). At this point the aircraft starts the detransition normally, its always rather aggressive (tips on reducing this would be appreciated), but nothing unusual occurred until the aircraft appears to begin a wing rock where it loses control and eventually ends up upside down in the grass.
I have some suspicions as to why the aircraft failed to complete the detransition back to vtol but I am biased based on past experience with this aircraft and would like a set of fresh eyes to look through things and help ID the root cause(s). To be clear, the push motor power reduction is a factor we already understand (for purpose of this discussion) and we expected the aircraft to be able to switch back into VTOL successfully despite this (it has done so on multiple occasions).
Your opinions, conjectures, and observations are much appreciated!
Why a 45 minute log
12cell pack ?
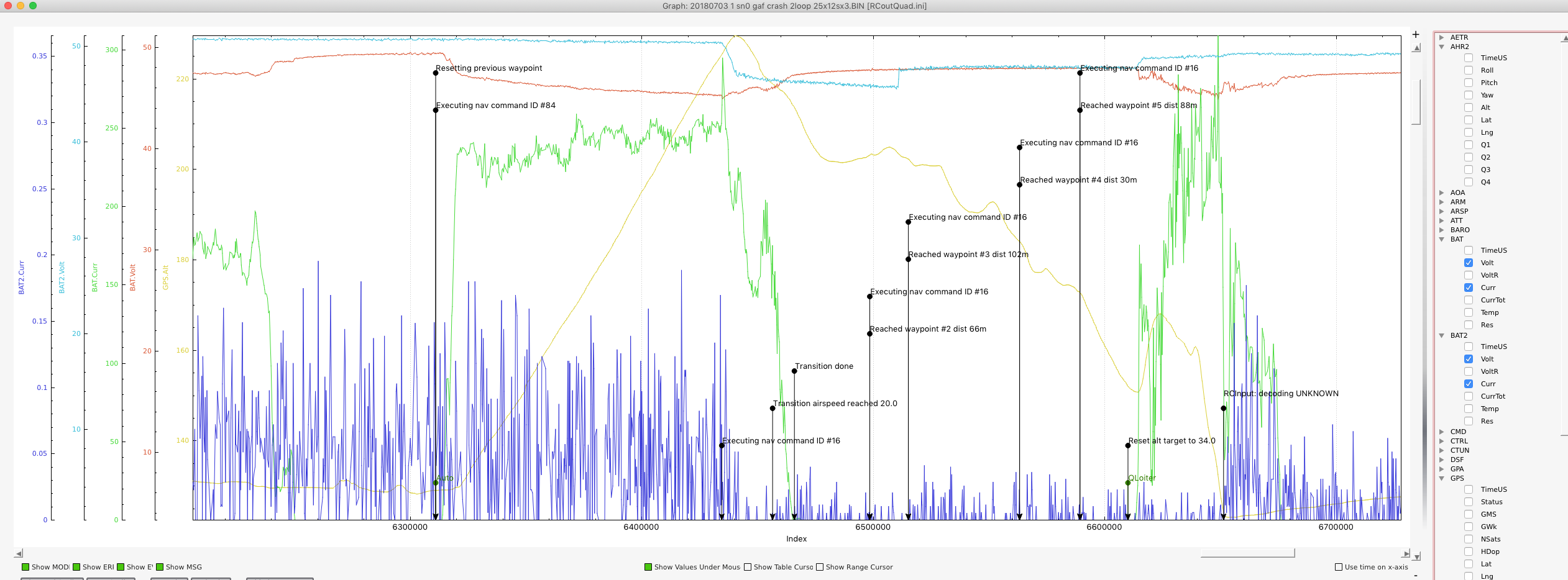
current draw in the hover over 150A
This must me a monster.
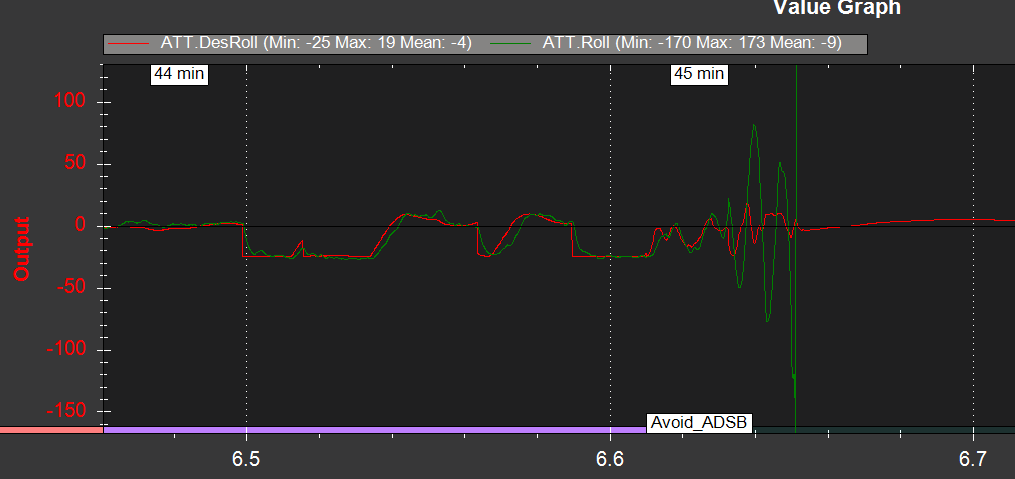
Have you ADSB installed because it all went wrong when it kicked in
Well your batteries are certainly up to it.
Not sure if this is correct but APM Planner is showing about 250A in the hover ??
Voltage is holding though.
Battery monitor 2 (do you have dual batteries?) shows only spikes on current draw, so what was happening there?
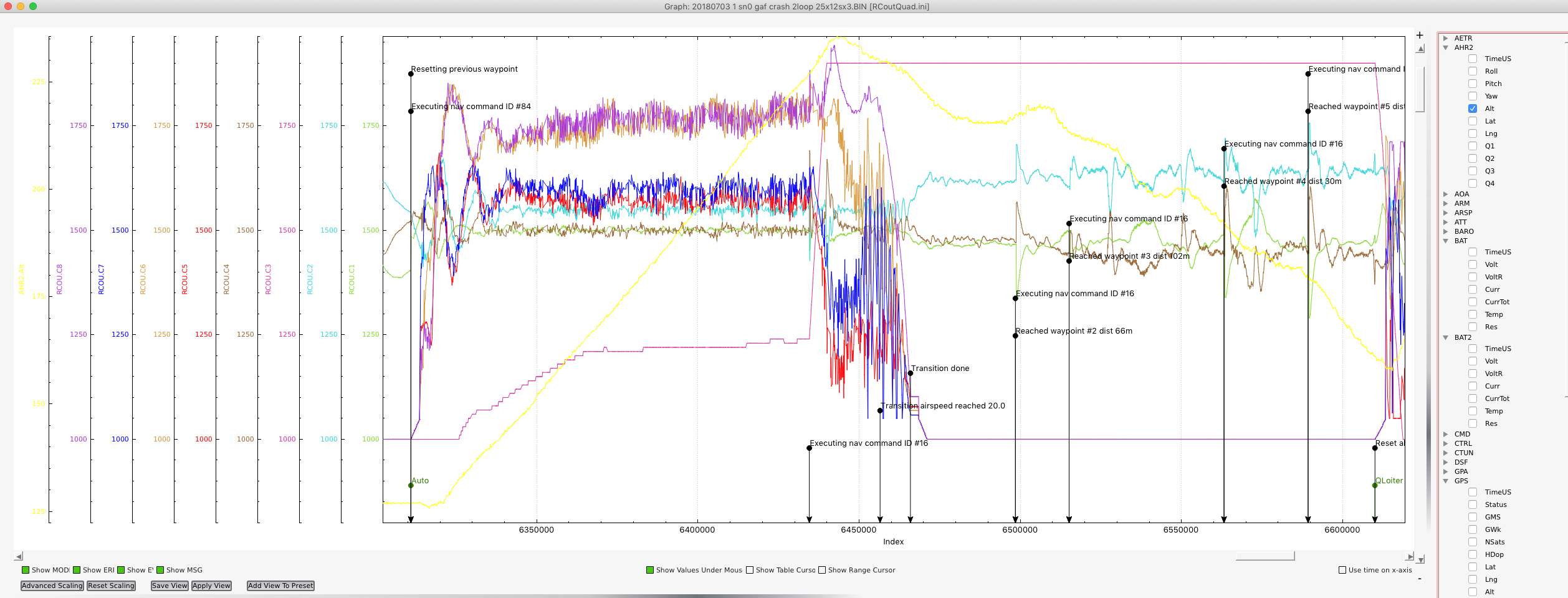
RCout shows 2 of your motors doing most of the work and virtually no assistance from your drive motor.
Were you flying with breeze? Unbalanced in Quad formation?
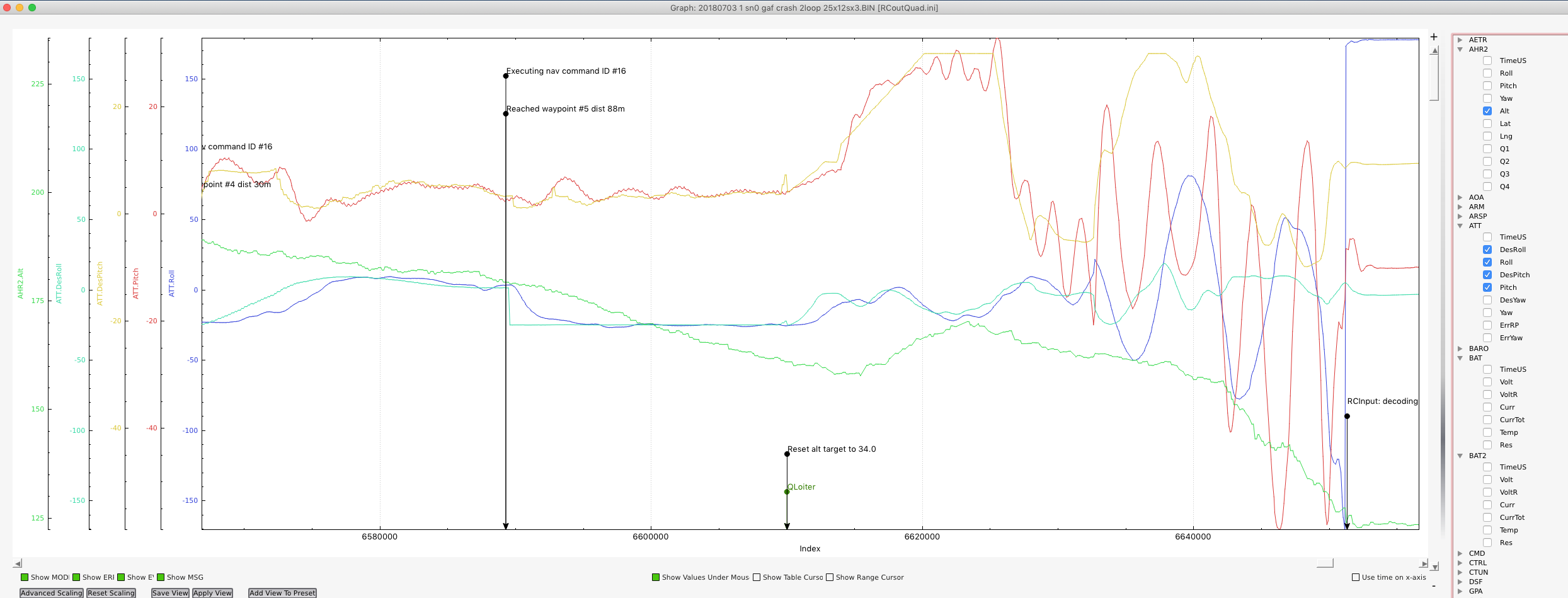
But it’s the ATT that indicates it may have just been a bad tune.
The ATT.Des is giving attitude commands but you can see the oscillation set in and it’s all over.
That’s what we see. I think most of it translates into sound… lol
Yes, two battery sets. One is VTOL dedicated, one for the cruise motor. Our Hall effect current sensor had a loose wire (we later discovered) and thus didn’t record data.
I think you’re only looking at 4 of the 8 motors there (channels 5-12) and the cruise motor shouldn’t be doing much to hold position relative to them. We do have a know issue with yaw on this aircraft (and since its a large quad plane the motor have to work pretty hard to counter that, fix is in the works)
That was my thought, at least in part. I think the Yaw issue you noted is also at play in the crash, and the final culprit maybe the low throttle position when manual control (Qloiter) was assumed. Granted, by itself that shouldn’t cause a wreck just a managed descent, but with low yaw authority the descent request lowers the yaw operating margin and the bad tuning takes it from there.