I need help figuring out what happened during this mission.(KDE Crash - Google Drive)
It seems the QUAD wanted to do another Takeoff just after it was midair heading to the first waypoint. Sadly if fell to the ground like a rock.
I had multiple auto missions executed with success with this drone before.
I attached the telemetry log as well.
Any input is highly appreciated.
Pixhawk 4 running Arducopter 4.2.0.
Quadcopter, 5.5kg, 6s, 17 inch propellers.
KDE motors and ESC
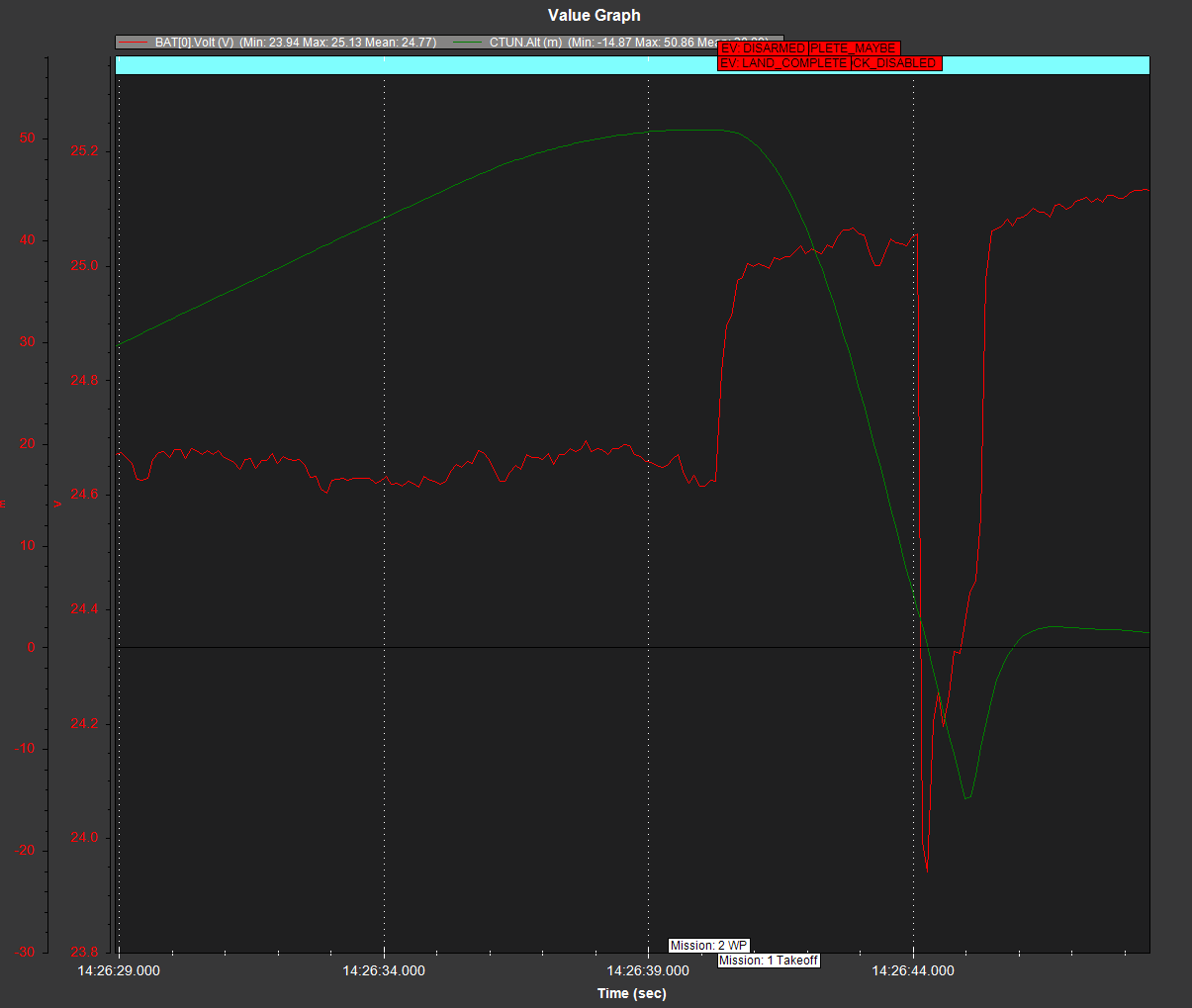
From what i could read in the log, there was no indication of a failsafe. Battery voltage was normal, amp draw as well.
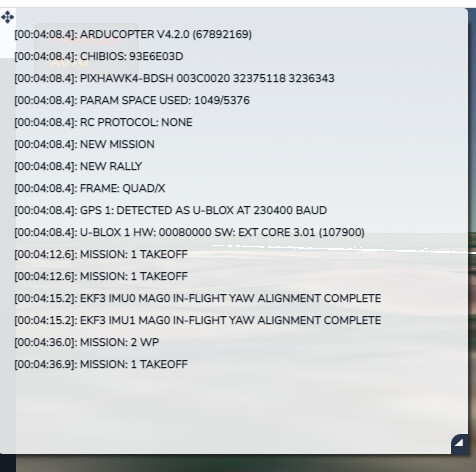
The motors just stopped spinning after reaching desired altitude. In the telemetry log i could see for a brief moment while the QUAD was tumbling down “Mission 1 Takeoff” message and the status that it was disarmed.
The autopilot was definitely disarmed mid-flight. You can see the climb to altitude in green and then the copter is disarmed. What is interesting are the mission related messages.
I’m not sure what your mission looked like but perhaps the issue lies in how the waypoints were configured. There is a message indicating 2 waypoints but I think you had more than 2 waypoints defined for this mission. Perhaps the mission was corrupt and the upload (partially) failed?
Something is very wrong can you share the waypoint file so i can try it in the simulator, the way its going from takeoff to waypoint back to takeoff is very unusual.
im wondering is it something that mission planner has created and uploaded by mistake or are you getting somethiung corruption on your memory card.
I have uploaded the mission in Google Drive.
I tried reproducing this scenario (disarming midflight then engaging mission shortly after) in the simulator, but no success.
This same mission was successful on other attempts with different hardware.
Given the fact that I wasn’t present at the location when the crash occurred, it would be helpful to know if there are any other logs that mission planner records, besides telemetry. I am suspicious of human error on this one, but before I can take any conclusions I need to do more digging.
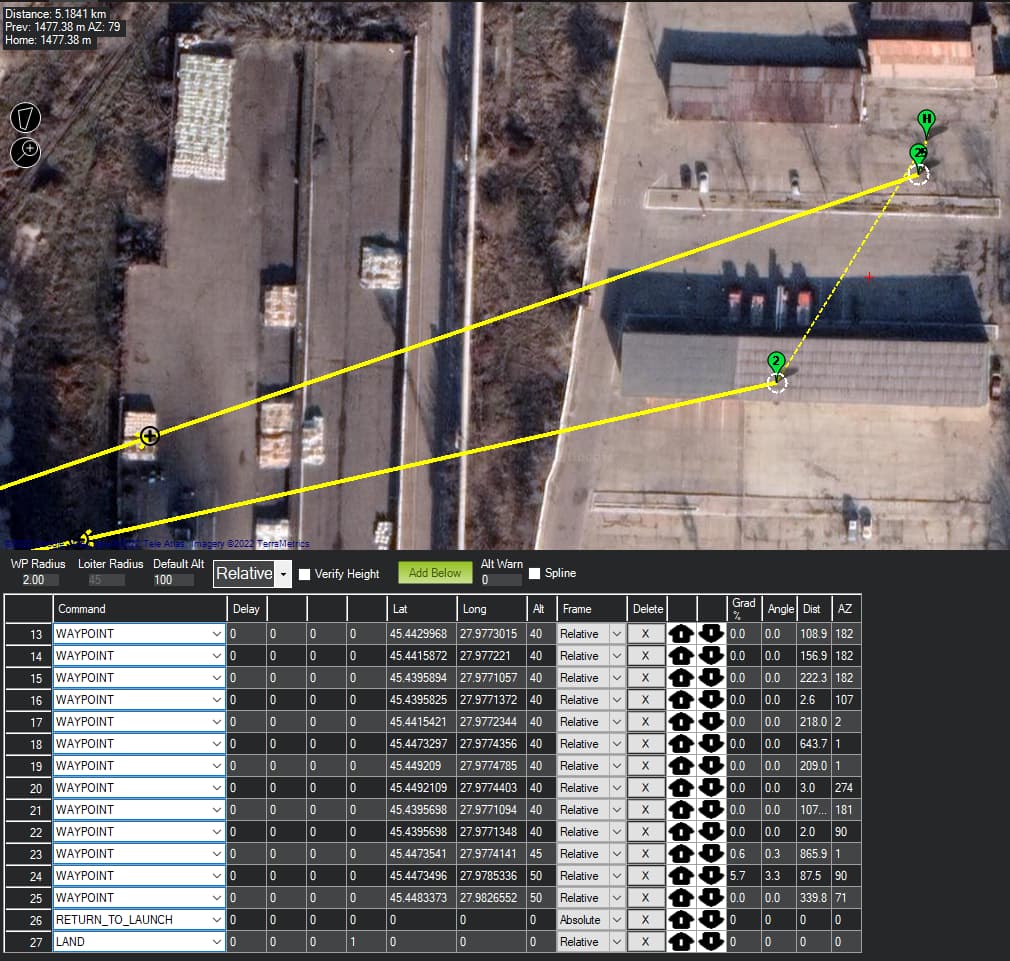
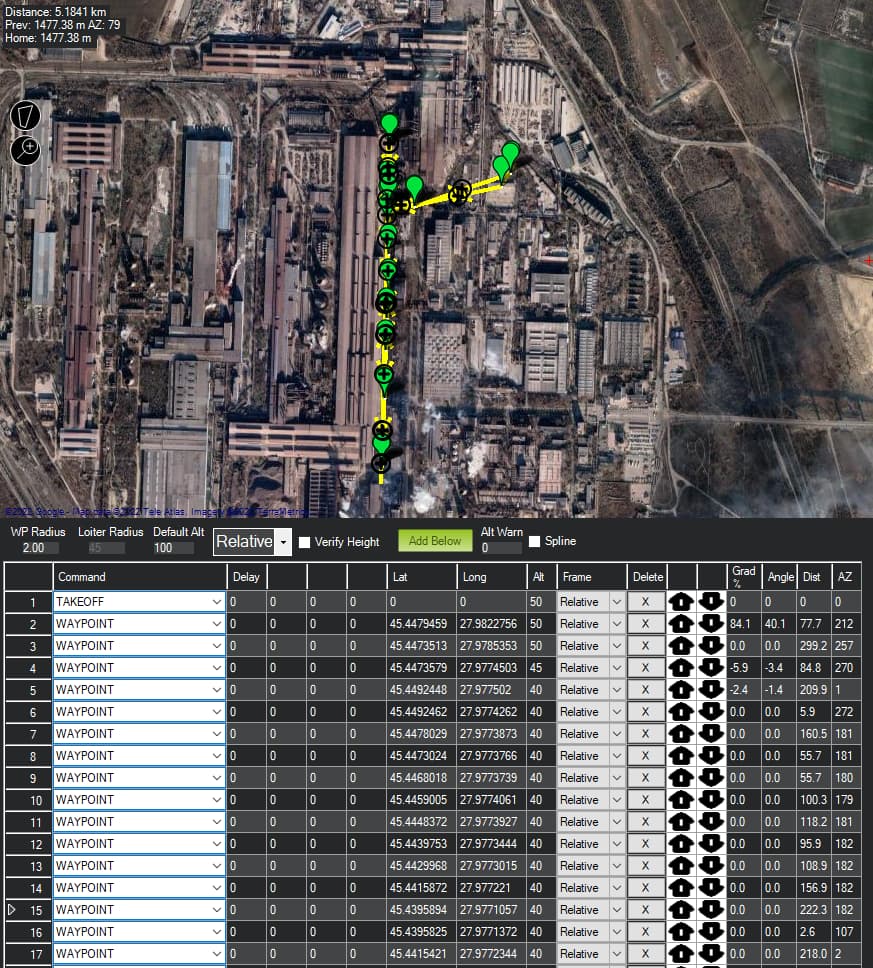
I connected the flight controller to my Pc and did a “read” command to check if the mission uploaded to the card coincides with the one from the PC.
Everything seems to be ok.
Attached are some snips with the mission from the FC.
Is there an LTE log of all MAVlink commands that have been sent from the raspberry pi to the AP? It may be worth checking no DISARM command has come through the raspberry pi.
Good point. The interface of the RPI is not accessible for the operator, but I will look into that.
I am also waiting for CCTV footage from where the operator was standing, maybe I can see something on the screen. Although, quality will be awful…
There may be a specific (AP) reason for the midflight DISARM but I think the forum would be full of reports if there was something obvious wrong related to AUTO & missions.
It may be worthwhile to keep in mind the AP could have acted on a DISARM command that came from the RPI via LTE…
If that is the case it should be logged in the (LTE) raspberry pi MAVlink command stream that feeds commands to the AP…if you can get hold of that log it will give you a pretty conclusive answer.
the first prompt and displaying takeoff again in the log would be consistent with hitting the restart mission button on mission planner just above the disarm button.