Hi.
Could somebody help me analyze my plane log. This was the third time I flew this plane and the first two flight where mostly trimming and finding a good CG, but I succesfully made one circle in loiter mode, and some 50 meters in fbwa mode. Today after I switched to Loiter the plane started to turn right, added throttle and never stopped turning right, so when it was about 90 degrees I switched to manual but couldn’t save it and crashed nose down into the ground.
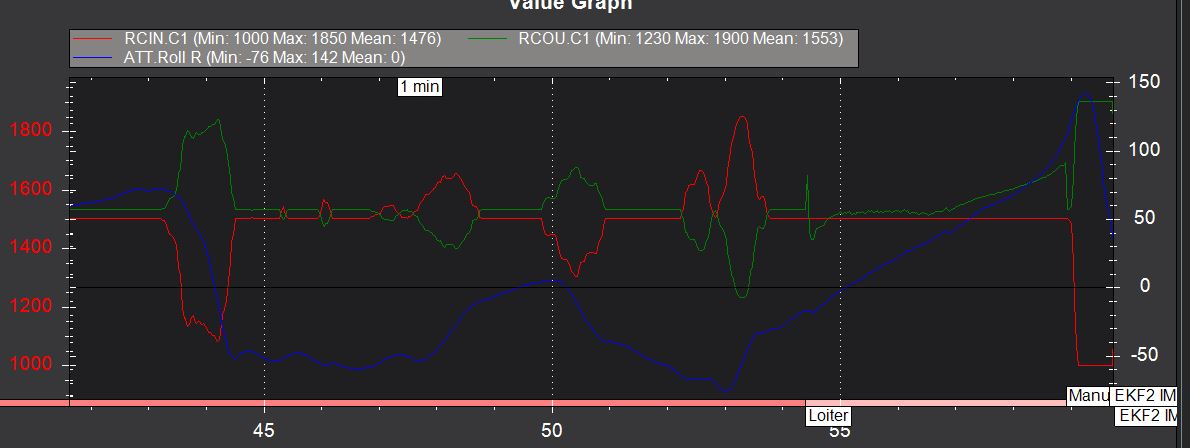
I’m not an expert it logs. All I could find is maybe in ATT.Roll and ATT.DesRoll. In the graph looks like the DesRoll stopped at 50, but Roll went to 150. Odd.
Really? But I made a flight before that and it worked.
I didn’t check pre-flight in fbwa mode for this flight. I still don’t understand why it would change between flights. Actually the only change I made was to loiter radius from 60 to 40 meters.
I now started thinking that it’s possible that I accidentally hit the reverse checkbox in Mission planner because I was thinking on trimming the elevator from there but then decided to not to. It’s possible that I didn’t see that I clicked on it because of the sun shining on the laptop.
I can’t extract params from the previous tlog flight and I don’t remeber if it had to be reversed or not. Is there any way to extract params from the dataflash bin file?
Oh, Rolf forgot to thank you. I will check when I hotglue the plane together. Thanks!
On a side note. Mission planner should have a Save button on the servo page, that way it wouldn’t be possible to accidentally reverse servos just with one click.
I managed to extract the good flight params by updating mission planner. Everything was ok, the aileron was already reversed in the first flight when everything worked.
I made a diff of all the params that changed between a good flight and bad flight:
good flight
bad flight
COMPASS_DEC
0.06090735
COMPASS_DEC
0
GND_ABS_PRESS
51015.58
GND_ABS_PRESS
50394.17
INS_GYR2OFFS_X
0.01245254
INS_GYR2OFFS_X
0.009244195
INS_GYR2OFFS_Y
-0.05279394
INS_GYR2OFFS_Y
-0.03473469
INS_GYR2OFFS_Z
0.003622743
INS_GYR2OFFS_Z
0.001236723
INS_GYROFFS_X
0.005003656
INS_GYROFFS_X
0.005379174
INS_GYROFFS_Y
0.0002330209
INS_GYROFFS_Y
-0.001001616
INS_GYROFFS_Z
0.0008673746
INS_GYROFFS_Z
-0.003074314
KFF_RDDRMIX
0.5
KFF_RDDRMIX
0.6
SR1_EXTRA1
4
SR1_EXTRA1
10
SR1_EXTRA2
4
SR1_EXTRA2
10
SR1_EXTRA3
2
SR1_EXTRA3
3
SR1_PARAMS
10
SR1_PARAMS
0
SR1_POSITION
2
SR1_POSITION
3
STAT_BOOTCNT
18
STAT_BOOTCNT
25
STAT_FLTTIME
168
STAT_FLTTIME
774
STAT_RUNTIME
16897
STAT_RUNTIME
28482
SYS_NUM_RESETS
27
SYS_NUM_RESETS
34
WP_LOITER_RAD
60
WP_LOITER_RAD
40
I can’t understand why this happened. Of course it was my fault with the preflight check.
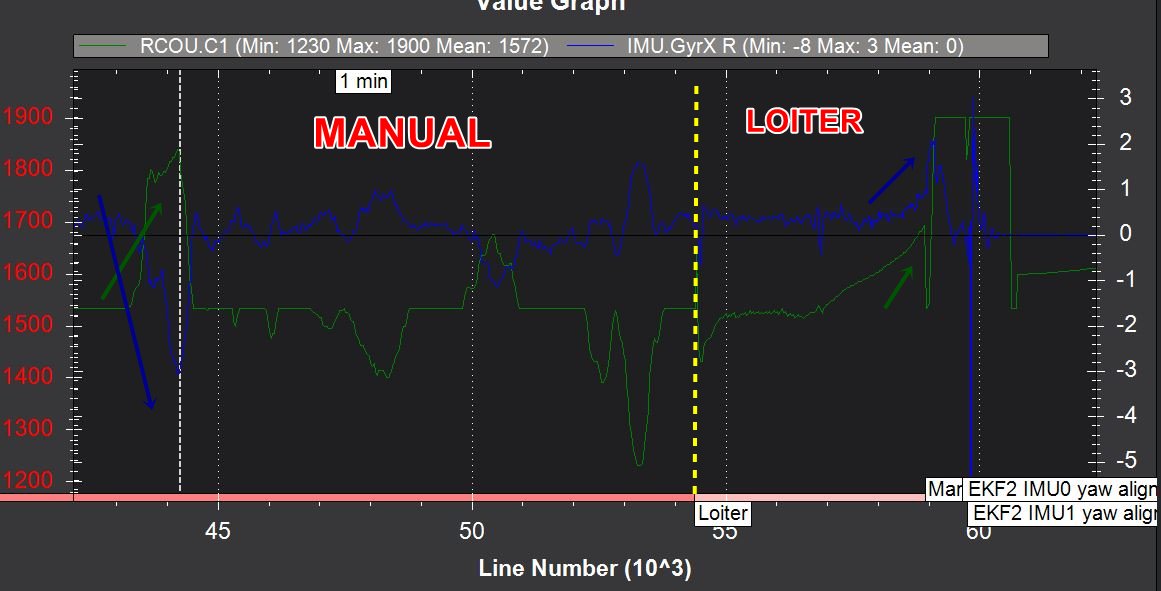
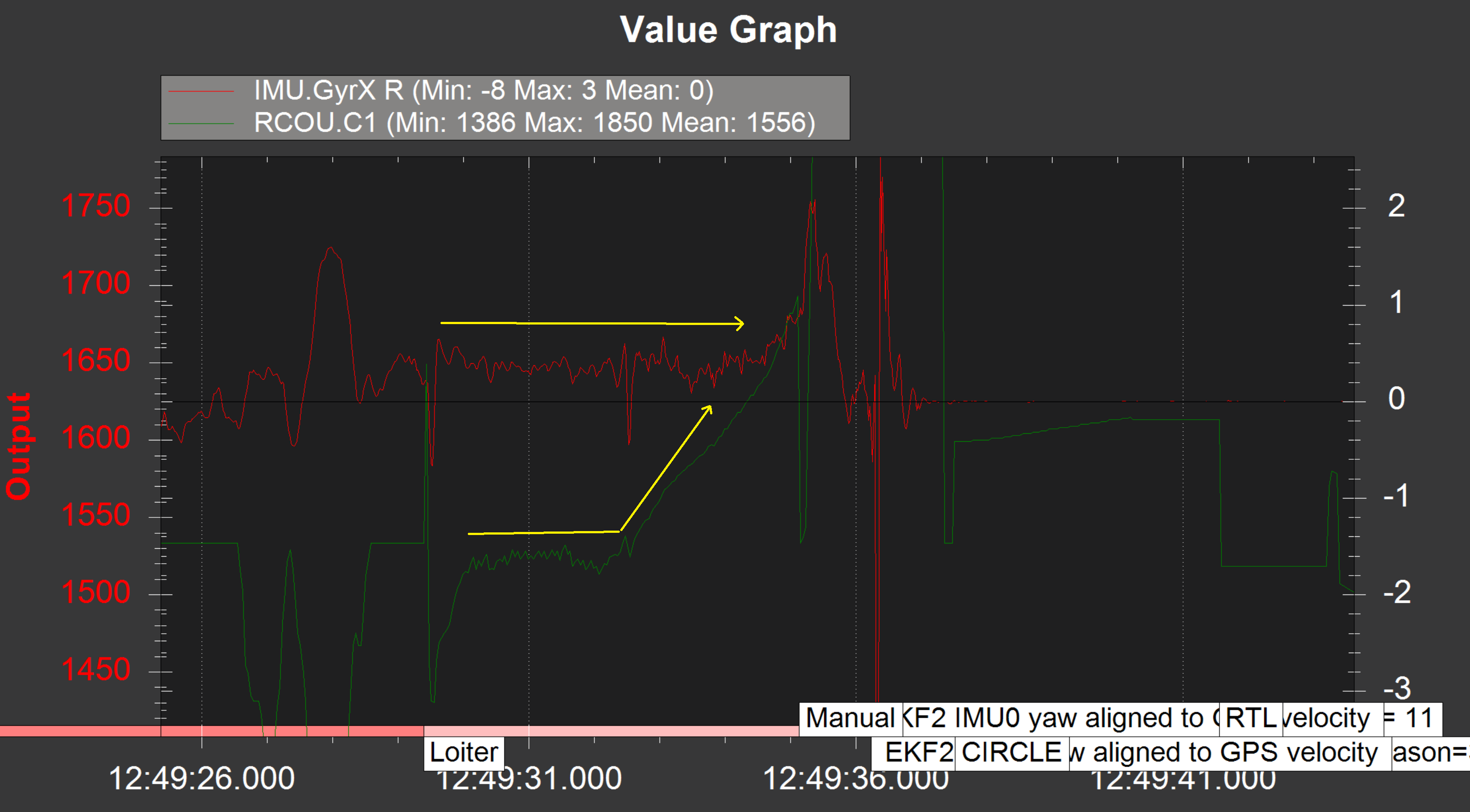
Thanks. But from what I see the gyro didn’t even react, it went more or less a straight line. Could be the gyro at fault? The previous flight went ok like I said.
Just wanted to update that I probably found out the cause of the crash. It was probably a combination of the plane pitching down a little when giving full throttle and not having set enough climb rate in auto modes. When I set loiter to only 40m the plane would go full throttle and full climb, but that wasn’t enought to keep the height. The full throttle picthing down mad things worse, probably because of a bad motor mount angle.