Hello there, I’m trying to make sense of my log file to determine the cause of my crash which happened when switching from RTL to Stabilize mode. From what I can gather, the copter commanded itself to roll over which caused the crash. Any help is appreciated as this drone will be carrying a “not cheap” camera and gimbal.
I do realize I had the throttle at min which would cause the copter to fall, but the actual roll followed the desired roll which caused the copter to roll to 170°.
Every single time you switch into stabilize from another flight mode with a copter you need the throttle up at least part way or it will drop out of the sky.Your reflexes will not be quick enough to recover the error.It will crash and it will flip over.Every time.Your response in this case was to switch immediately to Auto rather than staying in stabilize and maxing the throttle out for a short stab which may just have saved it.
I set a mid throttle beep on my Taranis so I don’t do this.
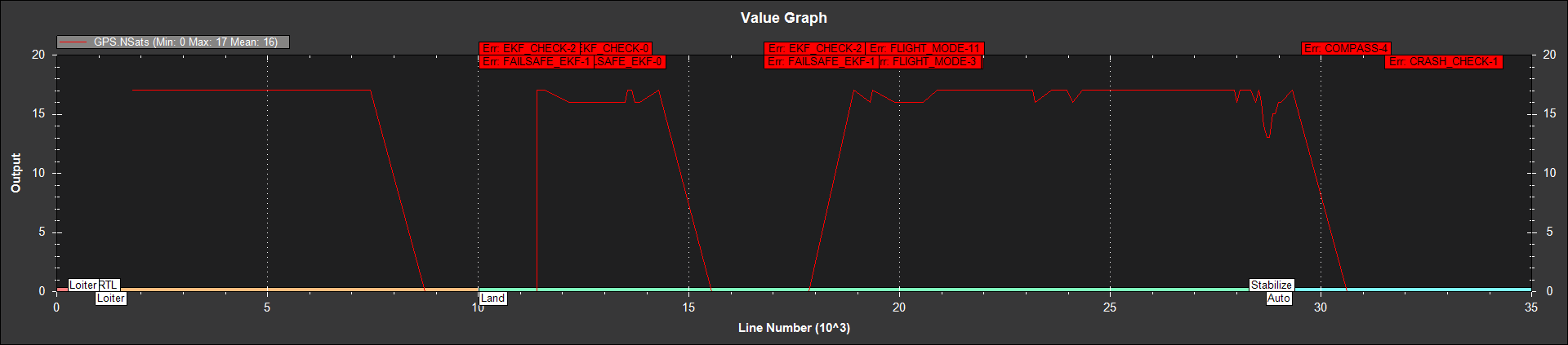
The GPS also dropped out a couple of times leading to (or because of) EKF errors on the log.That could do with looking at.
Thank you for the response! Agreed I should have had the throttle up prior to switching modes but I still don’t understand why the copter was commanding a roll to 170°. I’ve accidentally dropped out of auto before with throttle down and the copter just fell straight down, no roll or flip. I guess I just want to be confident that if I do come out of auto mode with throttle up that the copter won’t decide to roll again.
Side question, is there any good way to delay a mode switch? Right now I have my Taranis set up so that I have 2 switches that control flight modes (2 pos and 3 pos to give me 6 available modes). The only way I have to switch from one to another currently is to quickly cycle between a few modes, (i.e. if I’m currently at mode 1 and I want to get to mode 3 I switch through mode 2 quickly as I move the 3 position switch from pos 1 to pos 3. It would be nice to maybe have another switch that sends the flight mode value after I configure my switches.
Each action on the Taranis switches has a delay if you want.I just put a 0.10 or 0.20 second delay on each mode in logical switches.This way you can switch through to whichever mode you want without disturbance.It also prevents repeated mode announcements from the Taranis every time you switch.I’m pretty sure you can set the Taranis up to be as complicated as required (six position rotary switch etc) but the delay smoothes everything out.