My quadcopter was able to hover reasonably stable. However, It thought, I could increase it’s stability by tuning it. Shortly after takeoff, copter started to oscillate heavily in y-direction. As the oscillations started to steadily increase, I switched to land mode. Unfortunately, it was too late and the copter crashed.
Here is my log (the last flight was the problematic one). The changes were setting the six PID values given at Initial Tuning Flight — Copter documentation to 50% of their previous value.
Why did you post this on the copter 4.0 topic? Why not in the copter 4.2 topic?
Sorry, I always mix these up when I’m stressed, and it was shortly after the crash.
Any possibility to move it?
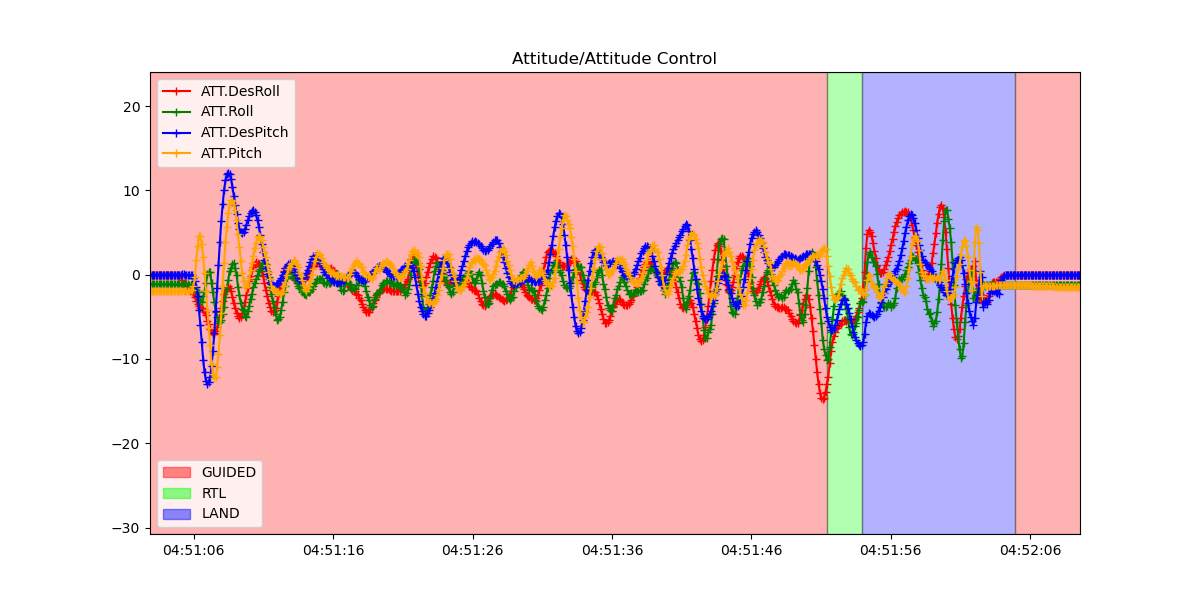
Maybe one of the tuning experts will jump in, but I think that 50% reduction was too much. Before the adjustment I don’t see the type of oscillations that the instructions are warning about.
Before:
After:
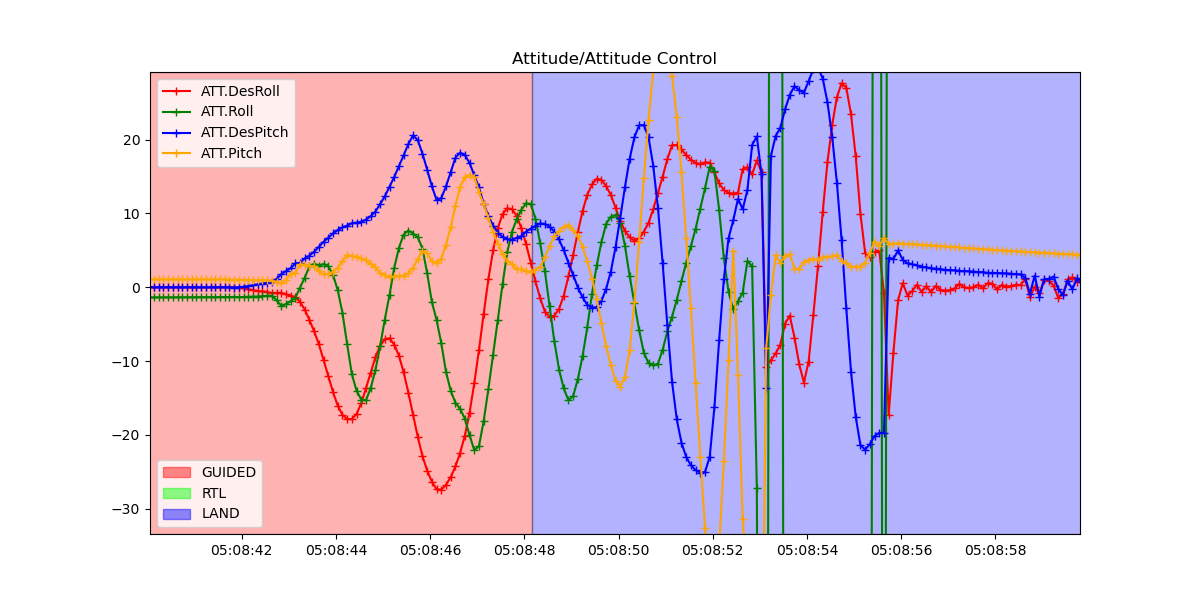
I think the 50% reduction in PID values softened up the tuning too much and created the oscillations. A better choice than Land mode would have been to use stabilized mode and manually land the quad yourself.
I suggest you reset the PIDs to the initial tuning values, set the notch filter and then evaluate the tuning from there.
You have Rate Pitch and Roll P&I at .0067. Double that is still way too low for even the smallest highest powered quad. Perhaps you are off by a factor of 10 when you set it? What size propped craft is this? On 4S power right?
1 Like
It’s a Holybro S500 v2 frame with 10 inch propellers on 4s batteries.
But you can forget about it. I just reset the firmware and your assumption was correct. The default values for P and I were 0.135, which I divided by 2 and magically received 0.0067.
That was the first easily solvable drone related problem in my life…
Thanks a lot.