hello guys, i designed a drone for my uni project.
the components i used are
Speedy bee f405 stack v3
F80 pro t motors
1200 mAh 6 S lipo
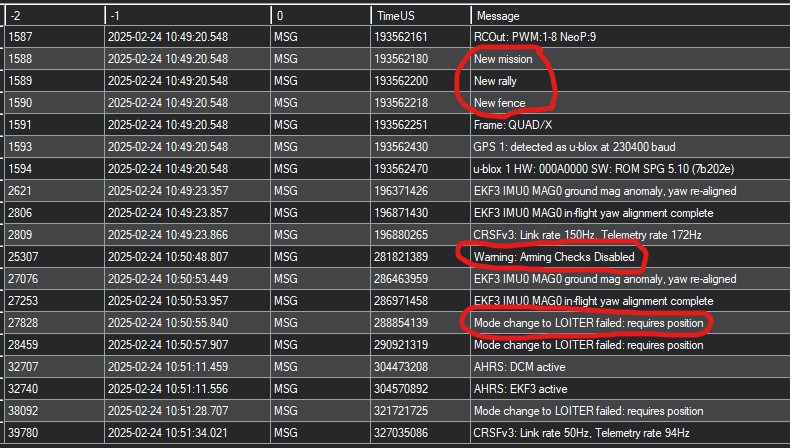
The drone gained altitude whenever i used to fly in altitude hold mode initially. Then i adjusted the paramaters. the para meters i adjusted were Mot_Thst_ hover. As my copter has high power to thrust ratio i had lower the parameter. I flew the copter again and again it gained altitude but this time it drifted so much, i lost control. I applied land mode so it could land but it didnt follow any command it crashed very far away from. i recover the drone fortunately and saw the logs. this time i saw ekf_yaw_reset error.
i am sharing the log file. you will see i did two flights. kindly help me. i will appreciate the effort. Thankyou
I kind of agree. If you do not know how to setup a copter, the configurator is too complicated. And if you do know… you would set it up directly, because it takes much longer with configurator.
Thank you! It’s exactly the point.
I like to raise one concern too: directing every new user to solve problems independently using software kills the community of the project.
I completely agree! Open-source thrives on collaboration, not just self-sufficiency. While learning independently is valuable, community support and shared knowledge keep projects alive. New users should feel welcomed and engaged, not just directed to solve things alone!
@randyV , @Michail_Belov@Paul_Paku
I totally disagree with your statements.
Everyone has his own choice to use this tool or not .
Everyone can decide to stop using the tool if he think it is to complicated
Everyone can help each other also without the use of the tool if he wants.
So there is no must to use this tool.
But on the other hand if you follow for a short time the forom reading each and every article you will find out that many really many questions come up while users not looking to the easy available instructions and informations. These users want to quick setup a drone, fly it and came up with first questions after a crashing the drone.
With the tool it is possible to overcome this first crash.
And I believe @amilcarlucas is open to get also your constructive criticism to optimize the tool.
By this the complete community has a benefit.
Well, I am not saying the configurator is bad in any way, but I feel that when I started out, it was not too easy to use. I would have prefered to have a very lengthy and detailed step by step text instructions, pretty much the same style as First Flight with Copter — Copter documentation
The instructions there are missing some of the issues raised in configurator, and so I did learn a few extra things from that.
But overall, I prefer to have a text based approach.
Now, for a complete beginner, your configurator must be much more explicit and detailed. It would not be so much of a program, but rather an interactive instruction compendium.
On the other hand, I understand that most questions asked here are almost always of the same type, so it is not very productive for you or other advanced users to explain over and over again how to solve few basic problems. But I insist, that using configurator is not very easy either… Basically, what Paul is saying is pretty clear: if you can easily use configurator, than most probably you do not really need it, or maybe you would glance at it as a quick reference, but if you can not easily use it, then you really need it…
Maybe you are right, maybe not.
Your answer shows what I meant.
You say I am wrong but you don’t give any hint why. For me this kind of critisim is useless. Critisim is only good if it shows why and best if it shows alternatives.
Just my 2 cents to give a positive viewpoint on the tool here…I have learned so much about ArduPilot through the methodic configurator that I probably would have never learned if it didn’t exist.
The first time I read it I felt in over my head as I realized there is so much I don’t know my There is so much to learn about ArduPilot and this guide really gave me a great pattern to follow. I had to read the article 3 or 4 times and follow links to the wiki to start to get it. And then I played with the software. What this showed me is I had a lot of studying and reading to do and it gave a great framework and order of operations for doing that.
Ultimately I have spent 10’s of hours reading the material, experimenting with the software, and looking through it’s GitHub repo. I’m personally grateful for the time amilcar put into the tool, and for the rest of the wiki pages and configuration tools the rest of the devs have built. It is a time investment for sure that you have to make since there is so much to learn, but for me I find that educational journey to be the fun part.