Hi,
I noticed a certain drift when I gave an auto-mission to my Rover operating on AR3.4.2 using GPS+Wheel Encoder at the same time with EKF3 enabled.
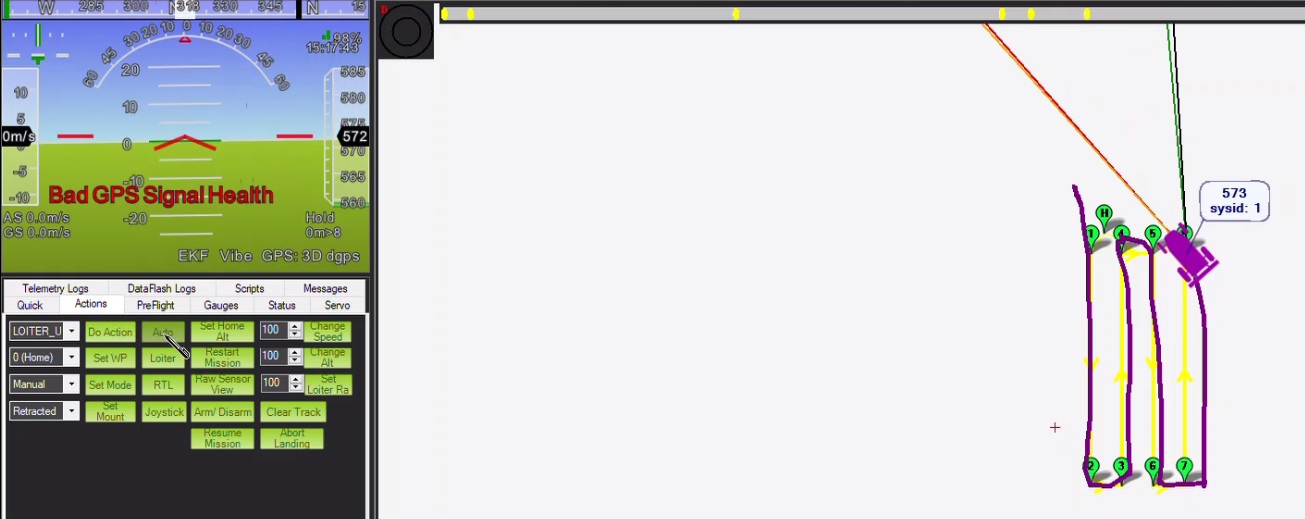
In the starting I got good results but each time when in last row the rover drifts from its actual path and take a leap. Why is this happening just for a single row or in the last rows? Is there any parameter to tune or any related setting to change.
I’m attaching logs, please help me with it.