I feel the need to get into gas powered traditional heli because of the cheaper fuel and longer flight time. LiPo battery will have short flight time, short life span, and expensive. Nitro fuel is very expensive.
I was told by other people that these 3D Heli mods have narrow frames and will have difficulties in install the electronics (autopilot, Telemetry air module, etc). I have seen video on mounting electronics for electric heli, however, the area occupied by the fuel tank will make the place unsuitable to mount the electronics in engine powered heli. Also, the ventilation for engine makes the place to mount the electronics even more difficult. I am wondering if anyone can share the photos from different angles on the installed electronics in the frame in your nitro or gasser heli, and give me some suggestions on where and how to install the electronics on the gasser mods I mentioned above.
Traditional heli is not common for autonomous flights, and even less common is gas powered.
There’s not much a Traditional heli can offer that can’t be done better with a multirotor to be honest, it was the development of flight controllers that made multirotors possible in the first place and they kinda took over because anyone can fly them the rest is kinda history, i did see a vid on yt of the Canberra guys testing a gaui gx i believe some years ago running ardupilot.
Yes it is true that there are not as many users active with traditional helicopter. They can certainly operate autonomously just as effectively as multirotors.
Quite a strong statement. In my opinion, I don’t believe that to be true. The biggest thing that draws users to multicopters is the simplicity of the system. Admittedly, helicopters have more moving parts and require specialized knowledge to operate them effectively. So users shy away from them because they are not as plug-in-play as multirotors.
I believe helicopters to be more efficient than multirotors. I don’t have any evidence for this but I think it becomes more evident when you weigh in what is needed for an aircraft to be reliable and safe. Multirotors would need at least 6 propellers to be able to survive a single engine failure which increases weight and drag (an additional two arms). Helicopters just need an additional engine. However they may not even need that because even with one engine, they can autorotate to a safe landing if that engines fails. With multirotors, power loss to the motors means it falls out of the sky.
Other than simplicity, I don’t think there is a clear advantage with a multirotor.
I agreed with Bill. In terms of carrying heavy payload and long flight time, traditional heli is much more superior than multi-rotor UAV with comparable battery capacity. With electric heli or multi-rotor drone, the flight time is really miserable. I have only flown my autonomous traditional heli for a few weeks, and I can see the brand new Turnigy 40C LiPos have bloated a little bit (although they are still in service). Nitro fuel is very expensive everywhere, so gas engine will be the choice for any meaningful applications. I wish there is a better muffler for gas heli engine to make it as quiet as a gas engine powered real car.
Yes, I have read the " New UAV Helicopter with gas power", and have PM both Chris and Ferruccio. The Synenry 766 that Chris used is not available, the Vario Benzin that Ferruccio used is expensive. The currently available gasser on the market are mostly for 3D flying, difficult to install electronics, Whiplash G2 gasser might be better, but I have not found anyone who owned it and installed the ardupilot on it.
The Whiplash is the way to go as I advised in PM, and I strongly advise you in getting at least a 3D printer before even starting buying the helicopter. The problem is you will have to self build several parts in order to get the autopilot installed (regardless of helicopter model/brand). The preferred location for installing the autopilot will be the tail boom close to frame attachment area, here is how I installed on mine:
You will have to provide the necessary isolation from engine vibrations, so here 3D printed stuff comes in really handy (the grey box and supports are all 3D printed).
I don’t believe that to be true either. Helicopters are more complex but they lend themselves easily to piston or turbine power, which with piston power can achieve flight times not easily accomplished with electric aircraft, and with turbine power payload capacity that is difficult to match.
The problem in the current market is that there is not much out there for piston powered UAV helicopters. So at the present, since I don’t know what the status or availability of the Gaui GX9 is, I think you’re looking at one of scratch-built, the Vario Benzin, or the Whiplash conversion. Personally, I prefer Zenoah-based two-stroke power. Those engines are reliable, have very high horsepower/weight ratio, and can run on little as 25cc of fuel/minute at the typical GTOW of 20-25 lbs of most 800-class UAV helicopters.
I do like traditional rc helicopters, they are fun to fly and they mimic the full size helis in many different ways, i still have a 50 and 90 size piston helis in the shed. I have considered trying to fit fc and make one autonomous when i saw the trad heli fw on ardupilot but the reality is elec is cleaner, smoother and more reliable. Brushless took over traditional rc glow and gas helis even before the rise of quadcopters. There are turbine models but the fuel consumption is huge and i take them to be about being a working model of the real power system a bit like live steam models rather than a real utility tool. Ceramic bearing change every 25hrs. (i have a jetcat powered aircraft too).
I used to argue the gas helis were good vs electric traditional for teaching people to fly rc helis on a trainer lead because you can do 25min flight and simply refuel and go again, but now i have a quad that will fly for double that time on a single battery.
But there are so many bearings and loctited screws and high inertia spinning parts that they are very hard to balance smooth like a quad, especially with a piston engine, and you know how vibration affects flight controller imu.
The few successful examples i have seen is the yamaha rmax, the gaui 50cc and 100cc, and the mosquito xet autonomous.
I agree that quads really aren’t useful for agriculture, they put a couple of 2l bottle on and charge a fortune to spray etc. But the mosquito project was around 1 million dollars from memory and im still not sure if its truly viable.
1 Million! That’s too expensive! There are several success in autonomous gasser heli from other members in this forum, their airframes/platforms are not available today or are expensive. That’s why I am trying to find a solution on the available/affordable airframes/platforms.
Could you please open that gray box and take photo of the inside that shows how the isolation from engine vibrations is done? What supports are 3D printed? Will this gray box large enough for other autopilots? Will the tail boom mount fits the Whiplash G2? Could you please share the files for the 3D printers?
I agree that electric is probably fine for most people because it is simple. However, there are some applications where piston power fits quite well. Say you are a commercial precision agriculture survey pilot that needs to cover thousands of acres in a short time frame. About 30% of the time you are weathered out. This is a time-driven business, on the days you can fly you put in 12 hour days and need to have the aircraft in the air 7-8 hours to make money. Turnaround time on the ground is quite important and the investment in batteries and in-field charging equipment is quite high compared to a 2 gallon gas can.
And then there’s the cost of maintaining your aircraft. Under those conditions batteries only last so many cycles before they have to be replaced because a cell goes bad. Experience has proven that a Zenoah two-stroke can fly at average 75% maximum power for 1,000 hours between top overhauls. All it requires is deglazing the cylinder and replace the piston and rings for about $100. Electric motors in helicopters, turning at 12,000 rpm or more, don’t last that long - either a bearing will go out or the motor shaft will break. I have flown both types under these conditions, autorotated two electrics due to broken motor shafts, one 105HZ nitro-powered helicopter due to a blown clutch bell, and one VX310 gas (Zenoah) due to an in-flight shutdown of the flight controller. In just about 5,600 hours of flight on three Zenoah-powered gas helicopters flown by me and my team we never had a single in-flight failure of a Zenoah engine.
The downside to the Zenoah RC-format engine is that is it heavy due to the flywheel that provides its forced-air cooling and powers its magneto ignition system. So, like any full-size piston aircraft engine, it doesn’t require a battery to make it run and its fuel pump is very robust and doesn’t require a gravity-feed fuel system. So a 800-class helicopter is going to be at least 20lbs takeoff weight fueled for an hour of flight time with 10 minutes reserve fuel. But under-slung belly aux fuel tanks work quite well with it and can be easily removed if not needed, flying on the internal tank which will provide 26 minutes at full power output. So the aircraft can be easily configured for a heavy payload by trading fuel weight and time in the air, for payload weight. Plus it can be flown under a wide range of fore and aft CG with either front or center-mounted under-slung payloads, which multi-rotor aircraft do not handle well.
Yes you must do your due diligence in balancing the blades and getting the tracking right. But it is much easier now that the notch filter is in the code to remove the rotor vibrations from the control signals. The EKF still requires that your vibrations be handled mechanically. But I haven’t had an issue with that as long as the FC is placed in a good position on the frame. For gas heli’s, you really need to make sure the engine is balanced. As @ChrisOlson posted, he liked the zenoah engine and I remember him saying that it was one of the best balanced engines that had low vibrations.
Another successful heli is the velos rotors V3. MissionGo has been using it. It is electric and Velos boasts that it has up to a 20lb payload and can fly from 30 to 90 min.
Zenoah engines are built in Japan, the company is part of the Swedish Husqvarna Group. In the RC-format engines do not use the G320. It has a 38mm bore and 26mm stroke, a larger crankcase, much higher levels of vibration and is designed for go-peds, go-karts, and RC cars and trucks. Any of the other RC-format engines from the G230 to the G290 will be fine for a UAV helicopter and they are available from a wide variety of vendors.
Just about every conversion kit for electric helicopters uses the Zenoah RC-format fan-cooled engine.
When it comes to availability of kits suitable for piston power, it is not out of the question to design your own helicopter and build it from scratch using commonly available service parts too.
But in the end I think you have to choose what fits your budget and needs. And realize that helicopters are a quite low-volume business compared to multi-rotor “drones”. The last two years of supply chain shortages for parts and availability of suitable models has made it worse.
This is part of my job, so I’m a bit reluctant to share some details, sorry . Of course I’m open to various forms of collaboration and also do a full setup/ conversion for you (which in my opinion is the best way- find someone that can do the setup and safely test fly the machine for you).
Going back to your questions, if flight time is your main concern, you can still achieve 30+ min flight time on a small/affordable 600 class electric heli without major modifications being necessary and keeping things overall at a simpler level.
Costs would be significantly lower, with a couple of batteries you are at about half of the budget needed for a complete top gasser setup.
How did this 30+ min flight time achieved? By connecting more than one LiPos in parallel or using 6S2P LiPos? If I connect more than one LiPos in parallel, will the unbalanced discharge of these parallel LiPos cause fire or other hazards? Are there any ways to do a automatically sequentially switching for these more than one LiPos?
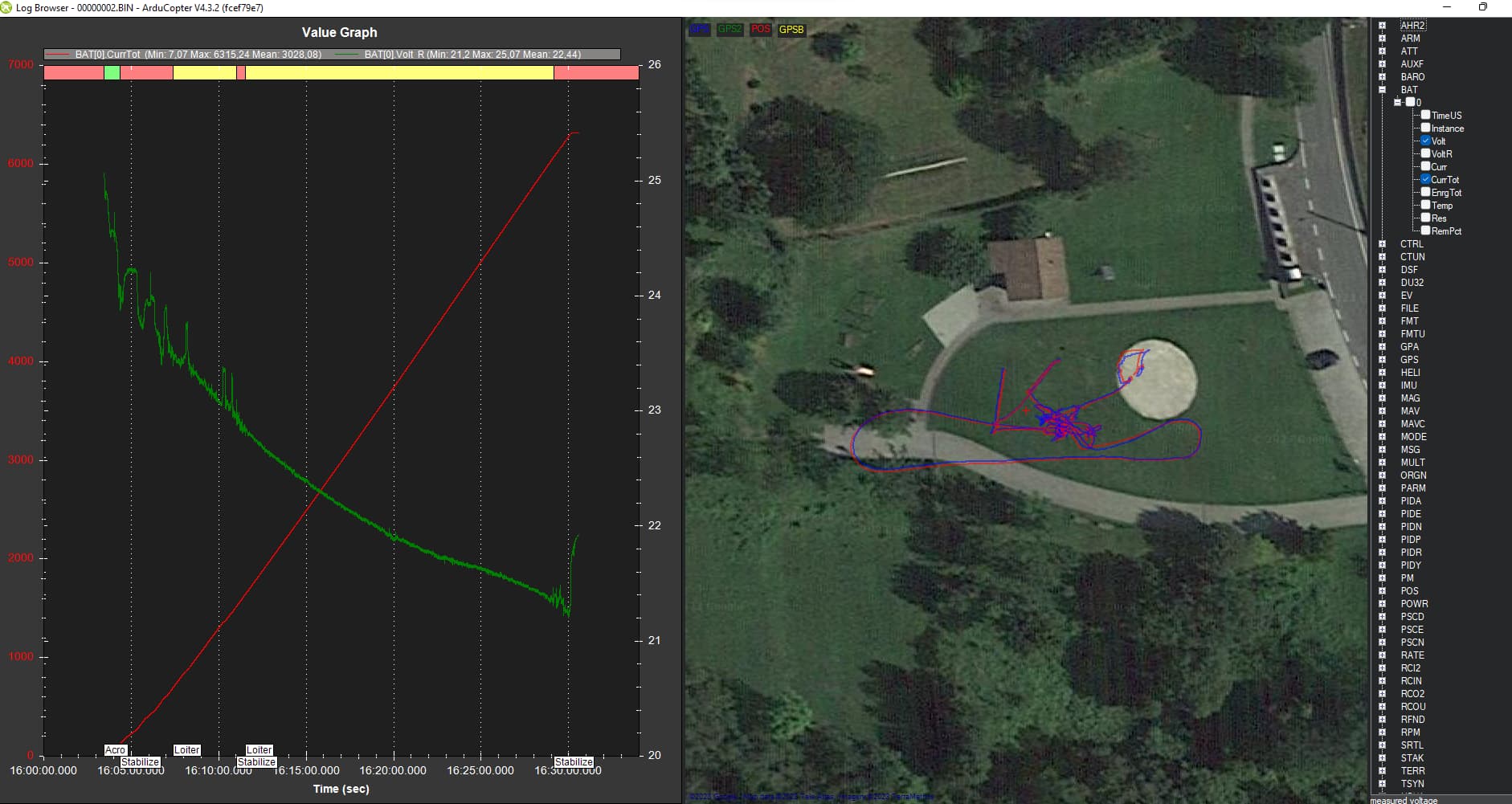
Flight test was performed out of ground effect and in hover condition, totalling 28minutes of flight (including payload which is an HD-Fpv camera mounted on a servo gimbal).
As a comparison a Tattu 6s 9000mAh is about 80 grams lighter than the battery I used and has more capacity, so even longer flight times.
To achieve longer endurance you have to reduce the rotor rpm and choose lower kV motors. Off the shelf setups are not good for this, they run crazy high headspeeds (for 3D agility) and burn out a lot of Watts in parasite drag. You will have to find the ideal spot, being a tradeoff between induced drag (collective pitch) and parasite drag (headspeed) with the recommendation of not going too low on headspeed (you still want to keep a safe margin on collective responsiveness and agility).
Here the same helicopter out for a short trip: DDFP tail rotor test flight - YouTube
Can be done but in a limited range, normally governor esc accepts throttle input between 70-85% for reliable operation. Lower than that you might have overheating problems
I do have one built which is our upgraded design of blackout mods g320rc conversion kit. We placed the electronics inside a box which is vibration free with dampers. It is flying quite well.