It would be very good if the route mapping pattern was added to the qgc software. As far as I know, it’s now possible by mavinci and sensefly ebee drone. I think that coding is not very complicated.


So basically, something like this:
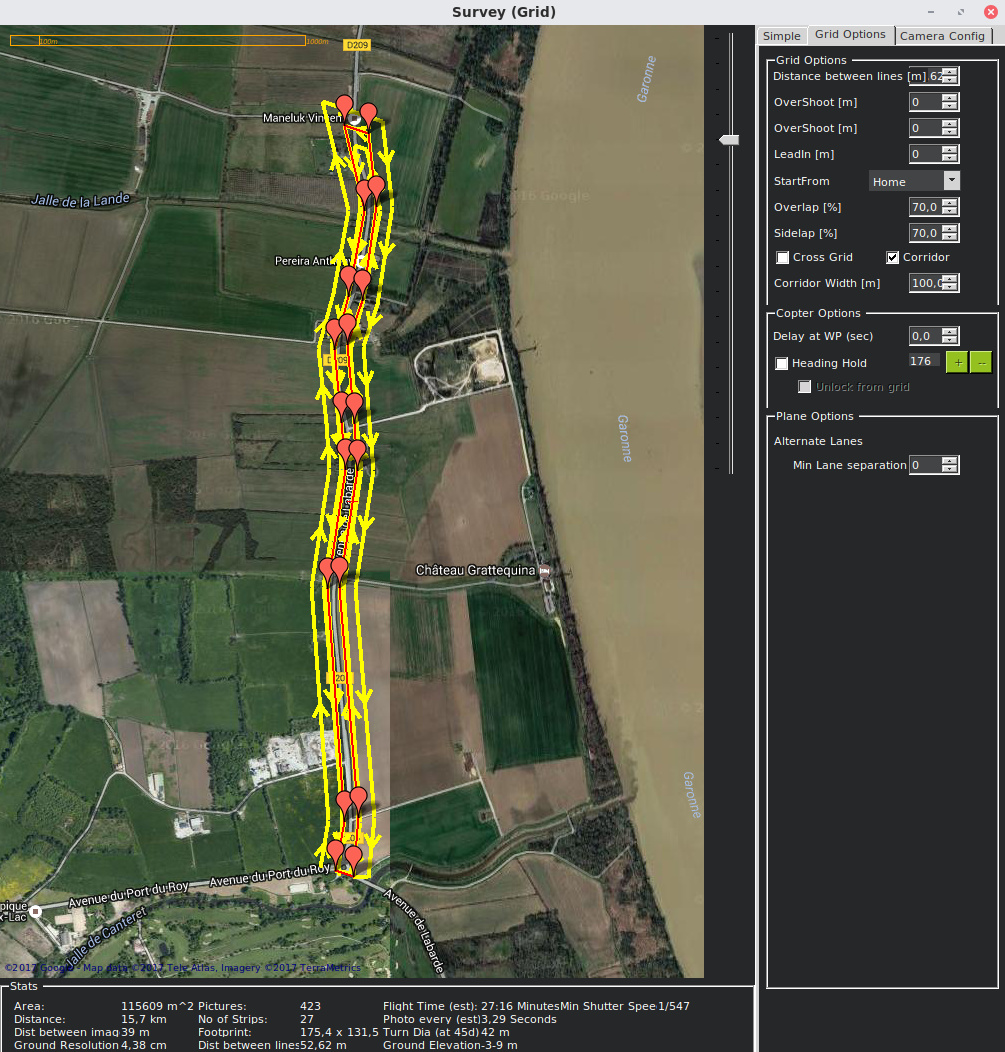
- Draw a vector path
- Specify the width of the corridor you want to map
- Survey the area covered by that area specified above by flying the vector path multiple times offset each time to cover the full width of the corridor.
Is that what you are talking about? If so, not trivial to add but also not hard.
1 Like
yes , it is right. percent of overlap and sidelap can be select .
Map Pilot, used by MapsMadeEasy, has just added this feature as well. They call it ‘linear’ maps. It works as you describe and can be very useful.
2 Likes
FYI: Discuss here - https://github.com/mavlink/qgroundcontrol/issues/5695
It seems that on MissionOlanner code (Grid/Grid.cs) there is a CreateCorridor as polygon:
Line 103: https://github.com/ArduPilot/MissionPlanner/blob/ee3ef0f1f15eb17e4022e96488f62d2adb6783d4/Grid/Grid.cs
I don’t know if it does what we want… but it seems so!
Let’s ask Michael Oborne about it (I have also open a issue on Github: https://github.com/ArduPilot/MissionPlanner/issues/1648)
1 Like
Very nice!
1 Like
Yes seems to be good ! Need to test it now … but could be better under QGC 
Do you know if QGC is able to inject GNSS position (RTK), as MISSION PLANNER do?
Yes ! But only with some gps.
Watch here : https://docs.px4.io/en/advanced_features/rtk-gps.html
Very good!!! The only problem is that I have a EMLID REACH… So I have to use the MISSION PLANNER…
you can use EMLID REACH in ppk
or ask here : https://community.emlid.com/t/px4-reach-integration/6277
I would suggest ppk also. But I think fabio want to use for navigation …
1 Like
or you can inject RTCM using mavproxy and still use QGC.
I have a PR for Mavproxy that adds support for EMLID
Where is your PR Lucas ?
Currently I only have one open pull request on MavProxy:
1 Like
What is the status on this request, I see that Mission Planner has it in it’s latest update, but would be nice if QGC can do the same.
Corridor Scan has been in QGC daily builds for a while now.
Creating a safety parameter for a shoreline, then being able to create a corridor with custom intervals and custom total width would be a great tool for Rover (boat / sonar survey) purposes.