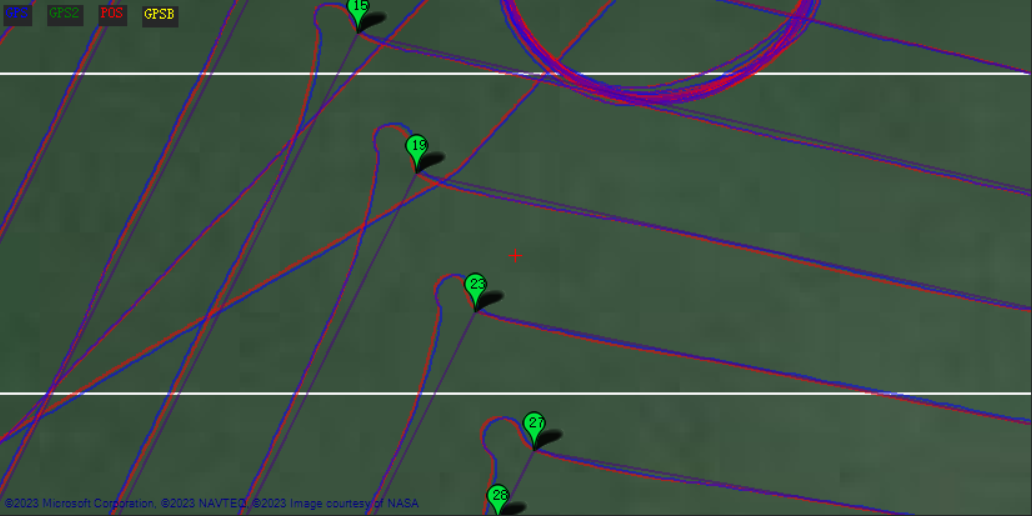
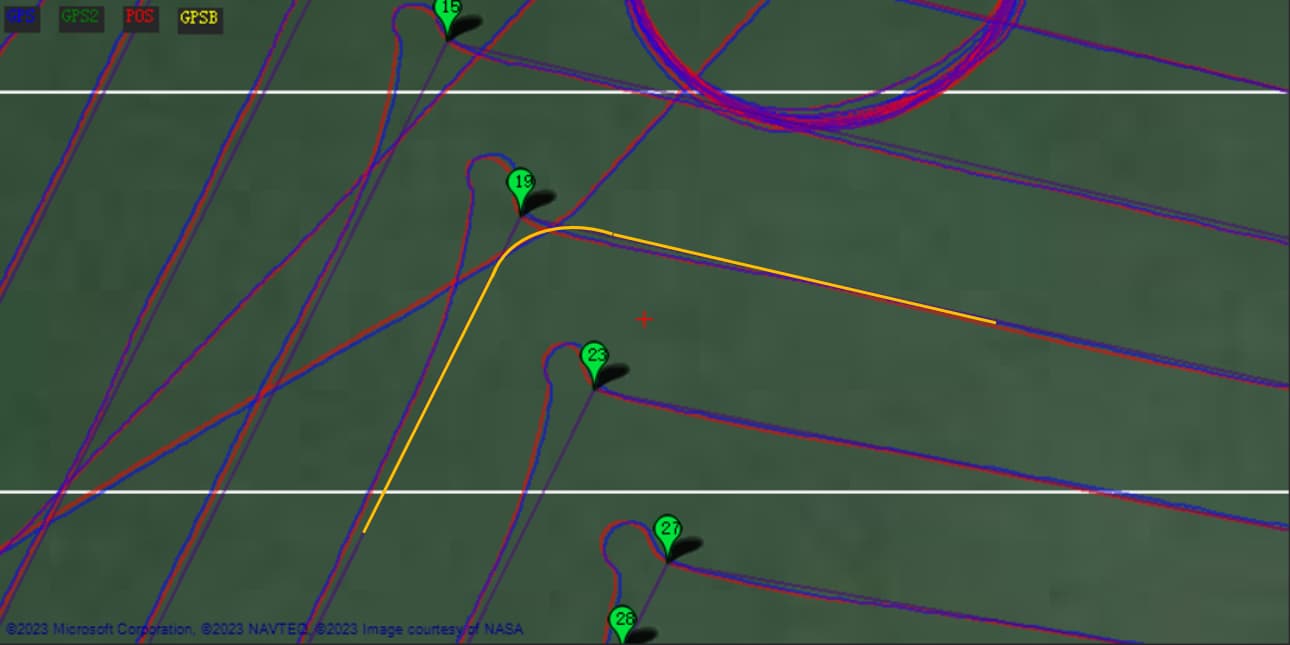
My friends, I encountered an unresolved problem while debugging my unmanned ship. After using an automatic debugging script to debug the PID values, I found it perfect for both straight and circular movements. However, after creating polygons through MISSIONPLANNER’s task planning and automatically generating routes, I encountered a problem that I have been struggling with. Every time I reach a turning point, the ship always passes the turning point and then adjusts back, As shown in this picture like this:
what can I do to ensure that the actual route does not exceed the range and is connected by a smooth arc between two straight lines? such as the yellow line
The caps lock key will not result in better or faster help.
I think your GPS is positioned well away from the vehicle’s center. Adjust GPS_POS* to tell the autopilot where the antenna is relative to the center of the turning axis.
I noticed that my ship doesn’t seem to have taken S-CURVE. I’m not sure what the conditions are for triggering this route. Can you give me a science popularization?
Your vehicle is skid steered, and you have WP_PIVOT_ANGLE set to 60 degrees, meaning that it will pivot on any turn where the heading change is greater than 60 degrees.
Reduce WP_PIVOT_ANGLE if you want different behavior.
WP_PIVOT_ANGLE holds the minimum angle error that will trigger a pivot turn. For example when set to the default of “60”, a pivot turn will be triggered if the vehicle’s heading is at least 60 degrees off from the next waypoint. This parameter should normally not be set below 30 unless you wish to disable pivot-turns which can be done by setting this parameter to 0. The vehicle will begin towards the next waypoints once its heading is within 10 degrees of the heading to the destination
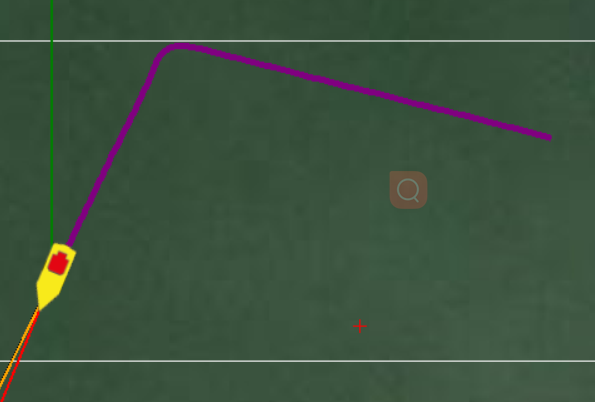
today i set the wp_pivot_angle value to 0, it worked! thank you very much !
but i forget download the bin file from the FC,i will put it here next day .
today i try to scan a river ,but the bota crazy ,why ?
can you help me ?
i guess maybe i forget turnoff the proximity avoid obstacles ?here is my bin log.