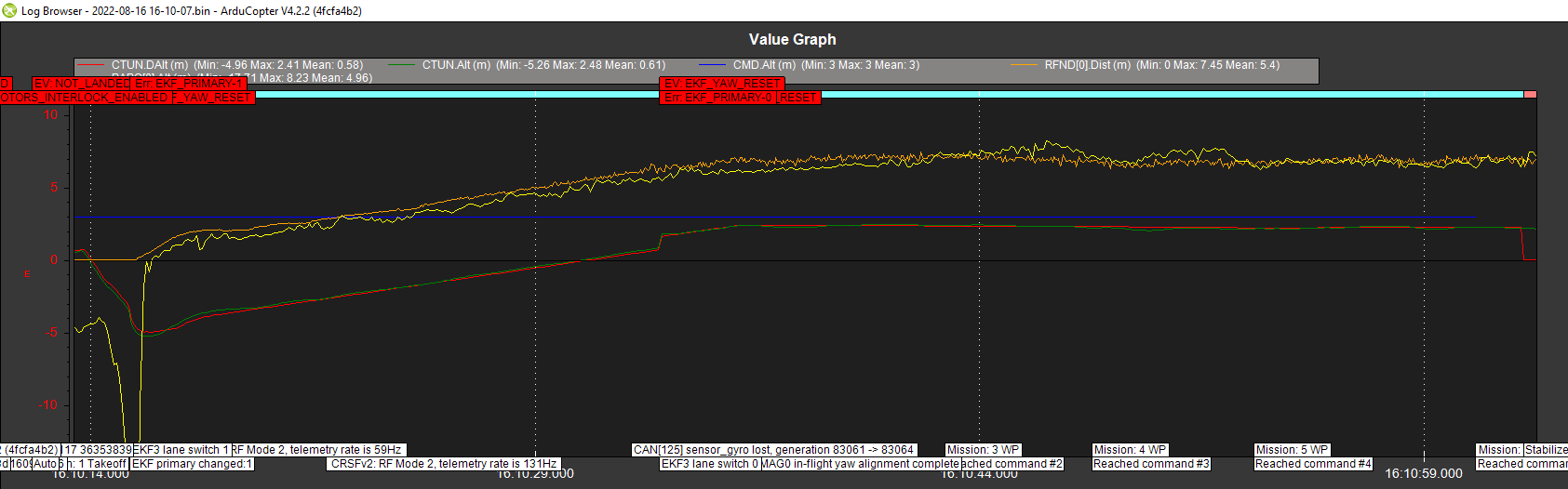
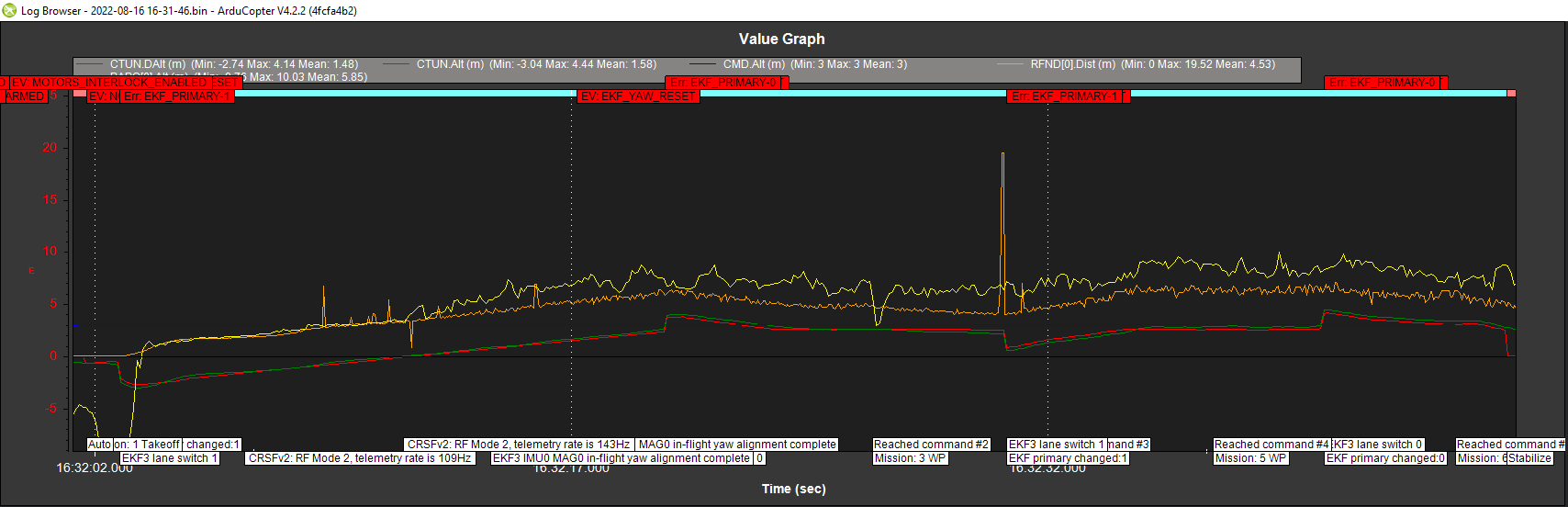
As you can see from the the pictures and logs attached, we are attempting to do waypoint missions at a consistent altitude of 3 meters. The altitude readings from all sensors on board (rangefinder, GPS, barometer) are all reading measurements far above 3 meters (around 5 to 8 meters), and the copter truly is at approximately 5 meters above ground level, but the copter is not responding by decreasing its altitude to match the desired altitude of 3 meters.
Hardware:
Mateksys H743-SLIM V1.5 flight controller
Here 3 GPS
Arkflow optical flow and rangefinder
We also have a Jetson NX and multiple USB 3.0 devices running on board, which have caused GPS interference issues in the past. Moving the GPS away from these devices has largely mitigated this problem.
Log 1: 16-10-07
-
Log 2: 16-31-46
Currently running Arducopter V4.2.2
Here’s a google drive link to the 2 logs: Logs for Ardupilot Forum (shared with public) - Google Drive
Would love to hear what steps to take to fix this issue.