Hi all,
My problem is my hexacopter crashed with one motor off. it should be able to fly even with one motor off right?
I have tried this with SITL, i modify the parameters SIM_ENGINE_FAIL = motor i wanna stop and also the param SIM_ENGINE_MUL = 0
i was in LOITER mode and the drone fell.
if the SIM_ENGINE_MUL = 0,3, the drone stabilize.
Does someone know why this could happen?
Thank you
Usually this means that with a complete engine failure you don’t have enough power. What is your hover throttle?
Also, failure handling is currently being improved. I’d suggest contacting @Leonardthall and discussing that with him.
Hi, @james_pattison thanks for reply
Basically, i start in stabilize mode then arm the motor and take off, once reach a certain altitude i change to loiter mode with throttle about 60%, else it still increases its altitude then i shut off one motor with SIM_ENGINE_FAIL and SIM_ENGINE_MUL then the drone fell… and impossible to control it
If you have idea, i would be glad to listen and thank you in advance
If you look at how failure handling currently works, basically when one motor fails you lose the equivalent power of two motors, to balance torque.
This means that for a hex, you have the equivalent of four motors left.
Have a look at the rc_out values in the log, and the desired vs achieved attitude. I think you don’t have enough power to maintain stability, but the log will tell you for sure.
Hi @james_pattison,
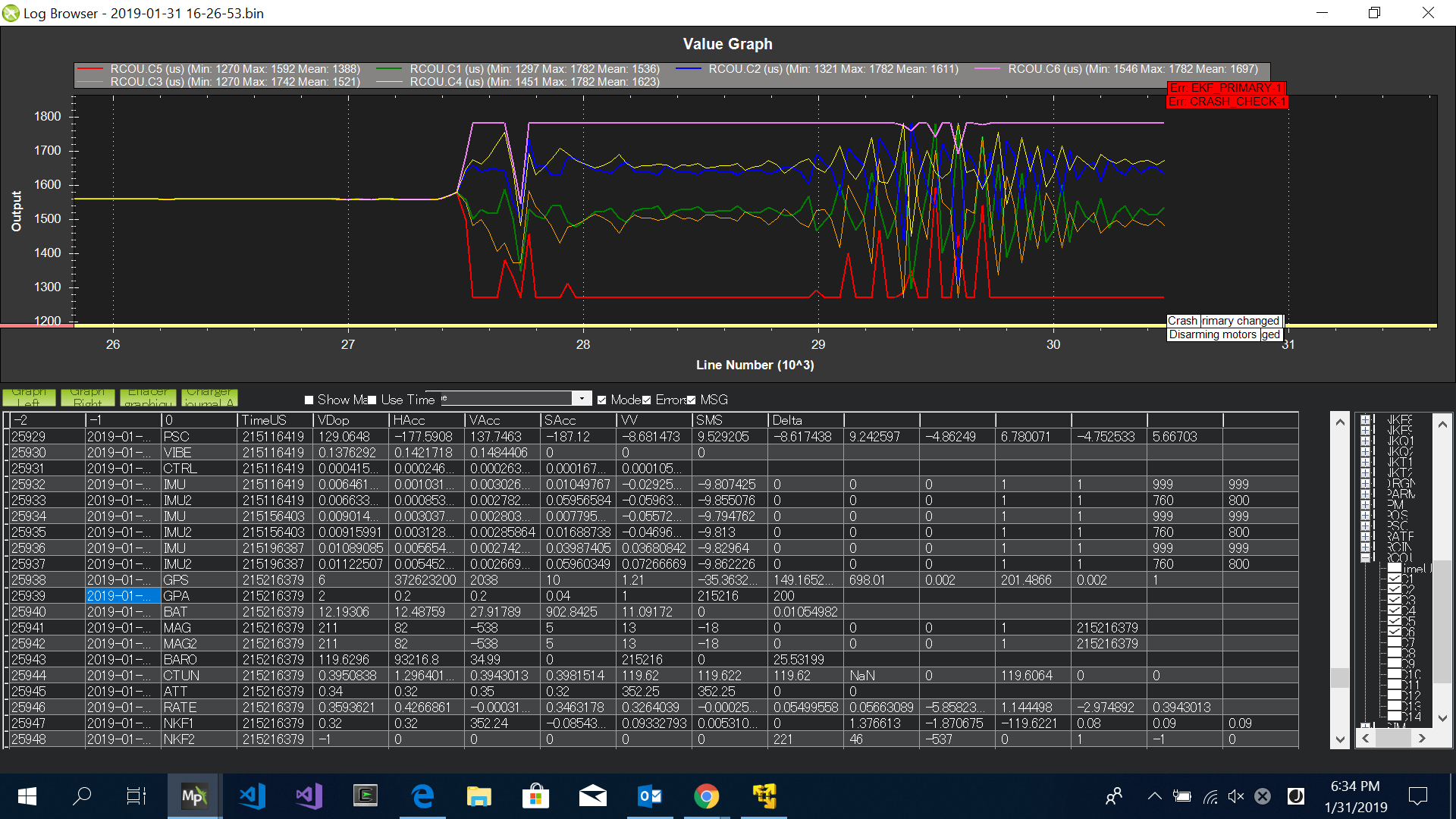
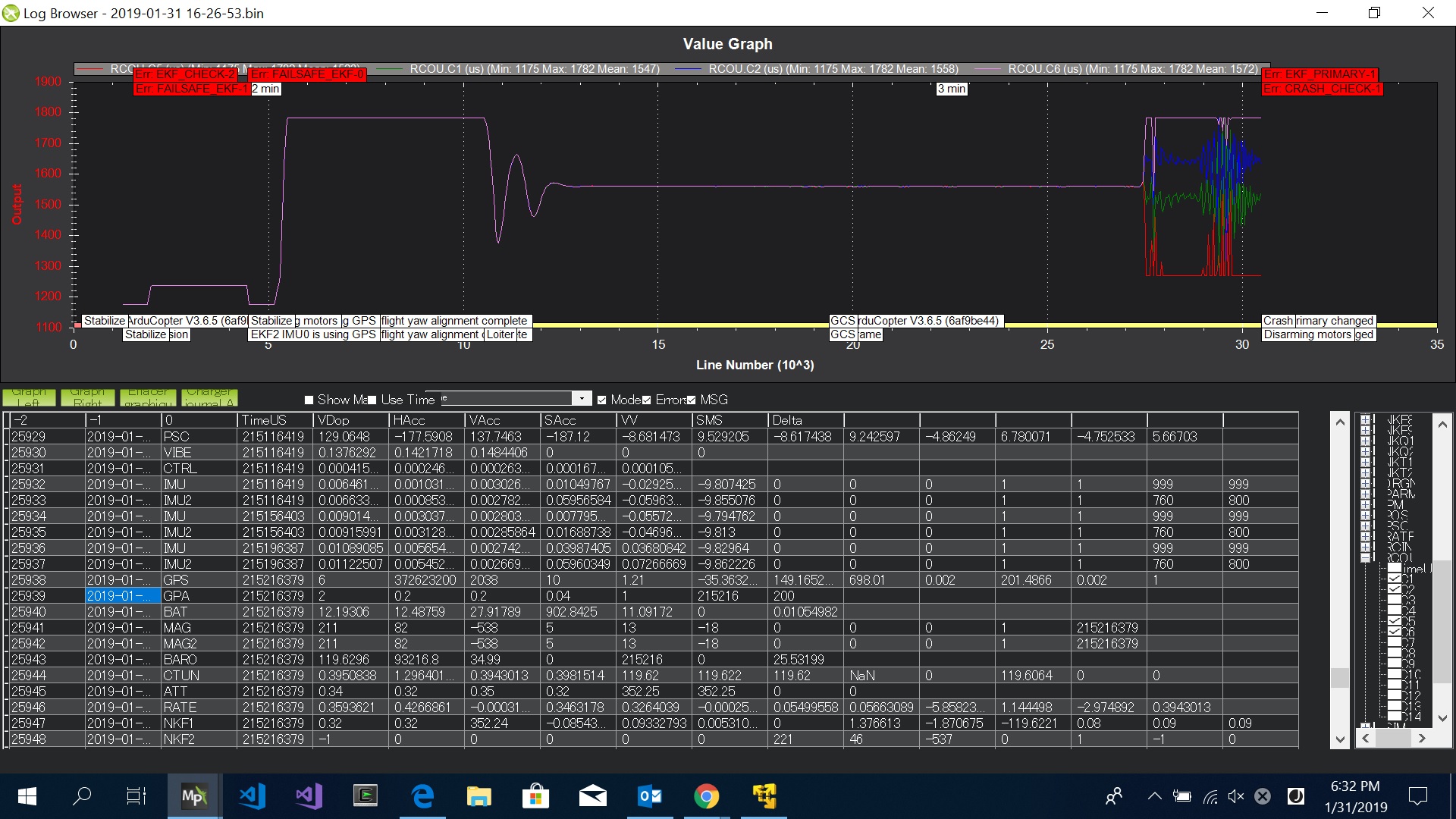
I have checked my log to check the RCout as u suggested me but i am not sure why the motor behave like this.
in loiter mode, with throttle in middle and After the command to stop the motor (the 5th motor) sent, the log show the stopped motor power going to its min. 4 motors start to oscillate and one think to have a maximun …
I am little lost …
I joined some copy of my log
Thank u in advance