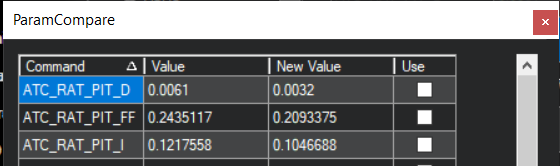
Just did some retuning anyway. Went through the Autotune processes for Pitch Feed-Forward and Pitch Rate-D and Rate-P gains. This time, I got a little larger FF gain. Rate-P has been pretty consistent at 0.061, at least if the 35% of max gain rule is followed. Rate-D typically ends up somewhere between 0.0030 and 0.0040. The heli was underdamped with these rates, so I set the P-gain to 0.061, and manual tuned the D-gain up to 0.0062, which cleaned up the response. At these rates, the Pitch axis is about twice as aggressive as the roll axis. Maybe it makes sense to scale back all of the pitch axis gains together? Or just reduce my FF gain back to about 0.20 (where it was).
. . .
Yaw Tune Check, (Could maybe do this at a higher frequency):
Some things maybe worth noting that I observed:
Pitch axis commands tend to have greater effect on Roll at certain frequencies. Same with Roll effecting Pitch, due to the gyroscopic procession effect.
I learned not to auto-rotate while in Auto-Tune mode. Didn’t hurt anything, its just how I like to land, come in a few inches above the ground then shut off throttle for a smooth landing. When I did this in Autotune, the heli immediately hugged the ground. This is probably expected behavior, but for guys who fly helis a lot, it is common practice to set down with throttle off.
For RC heli’s, there is a lot of coupling between the pitch and roll axes both in the command and the response to rates. I am still working on trying to have the autotune one day tune that out potentially using the rotor phase lag.
Yeah, you should unlearn that habit, especially for modes that use altitude hold in the vertical axis. You don’t have direct control over the swashplate. Autotune is especially bad since we discovered the bug. It does not handle throttle off the same as other modes designed to use altitude hold.
…
I think you should go back to the Pitch FF gain of 0.209. The gains at lower frequencies are higher with 0.24.
The tail tracks really well, but it could maybe chill out a little bit. It’s twitchy on the ground, and sounds like it’s working more than necessary to track position during flight. What is the best way to “soften” the tail response?
I actually like how it handled the way it was after manual tuning. Things felt natural. My Rate-P gains were much lower, Rate-I was higher. Makes for a natural overshoot with slower error response, reducing any ringing. Feels good in manual flight, but I suppose the tight control is necessary for a stable autopilot?
I think you can back off on the rate P gain some. You could try 0.4 and see how you like that. That would help with the comment of working more than necessary. I’m not sure what you mean about it being twitchy on the ground. are you making inputs or the tail is just moving around?
Are you still referring to the yaw axis?
For all modes, you want the aircraft to track the desired attitude very closely. It is important in autonomous modes because the position controller is relying on the attitude controller to set the requested attitudes in order to have the desired velocity and position of the aircraft to be tracked well. I think this is different coming from the RC world because you, the pilot, are expecting it to respond well to your inputs. You don’t care about some command model and whether the actual response tracks well to it. You just want it to be crisp and responsive to your inputs.
You can change the tuning to your liking. It is just important to understand that the desired response must be tracked well by the aircraft. Autotune is a work in progress and I currently don’t have a way to set the intensity of the tune. it is pretty much looking to get the most out of the aircraft without causing oscillations, however this can be challenging with helicopters and requires filtering to do it well. Thanks for trying autotune and sharing your data. It helps me learn about tuning different aircraft and a 900 size heli is definitely one of the bigger ones.
I am not making any inputs. The tail just is responding to vibrations and wind. It oscillates a little on the ground just because it is fighting the ground.
I am referring to all axes. This was the general difference between my manual tuning, and the auto-tuning.
Thank you for your support on this! I’ve been opening up my college books on Control Systems trying to get back into the “swing of things”. There’s a lot to understand though in applying it. It’s a topic I enjoy, but definitely needed your experience to get through the tuning.
I did some Auto flights today. That may contain some useful data as well:
For future reference, this tuning was for the RHE1E29XW E1 900 PLUS KIT (Tri-Blades Rotor Head) helicopter from Align. All flights and tuning were done with 2x 6S, 16000mAh Li-Po packs. No payload was attached during tuning. And a light camera gimbal payload has been added during flight.