I’ve been running the simulator and then doing some auto missions with my helicopter! It’s been great! Made a few Photogrammetry maps on DroneDeploy.
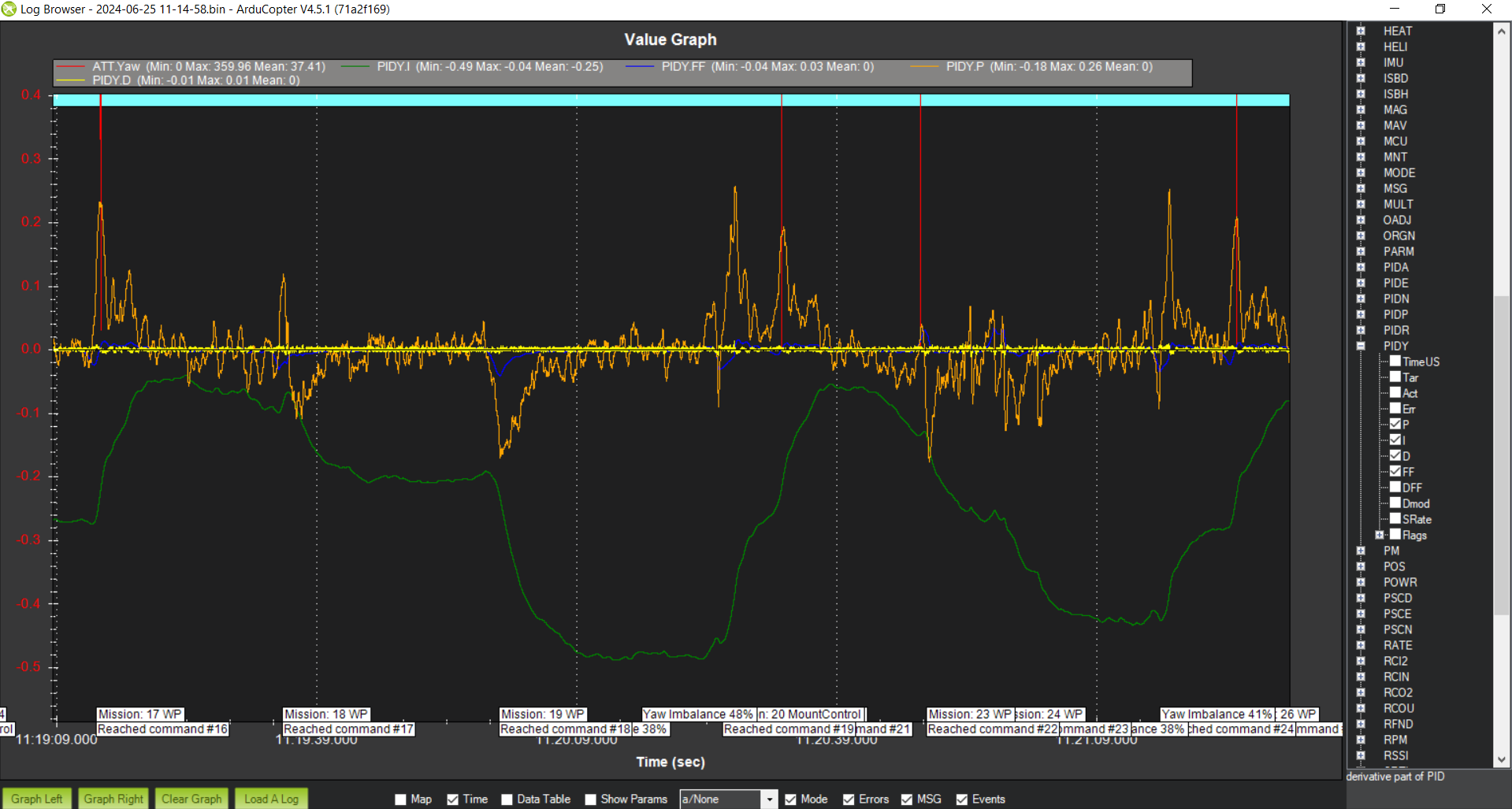
I started trying to set the camera gimbal angle from the mission plan using DO_MOUNT_CONTROL. It seems that this command is causing the copter itself to move. It is moving far off course during a 2-second DELAY command immediately after the DO_MOUNT_CONTROL command. I’m looking into why this is. I have read that this command will control the YAW motion of the helicopter if the gimble does not support yaw, but it doesn’t make sense that pitch and roll might also be affected.
I had my WP_NAVALT_MIN set to 5 meter. I figured this would prevent movement at low altitudes. It’s doing just the opposite. I guess I’ll set it back to 0.
I came across WebODM recently, but haven’t stopped to research that option just yet. Haven’t seen this link though. Looks like it does everything! Thanks for pointing me to that!
DroneDeploy doesn’t seem to offer any real control or accuracy for survey grade design.
I was trying out AgiSoft. Its a bit of a learning curve, but models seem to be quite accurate.
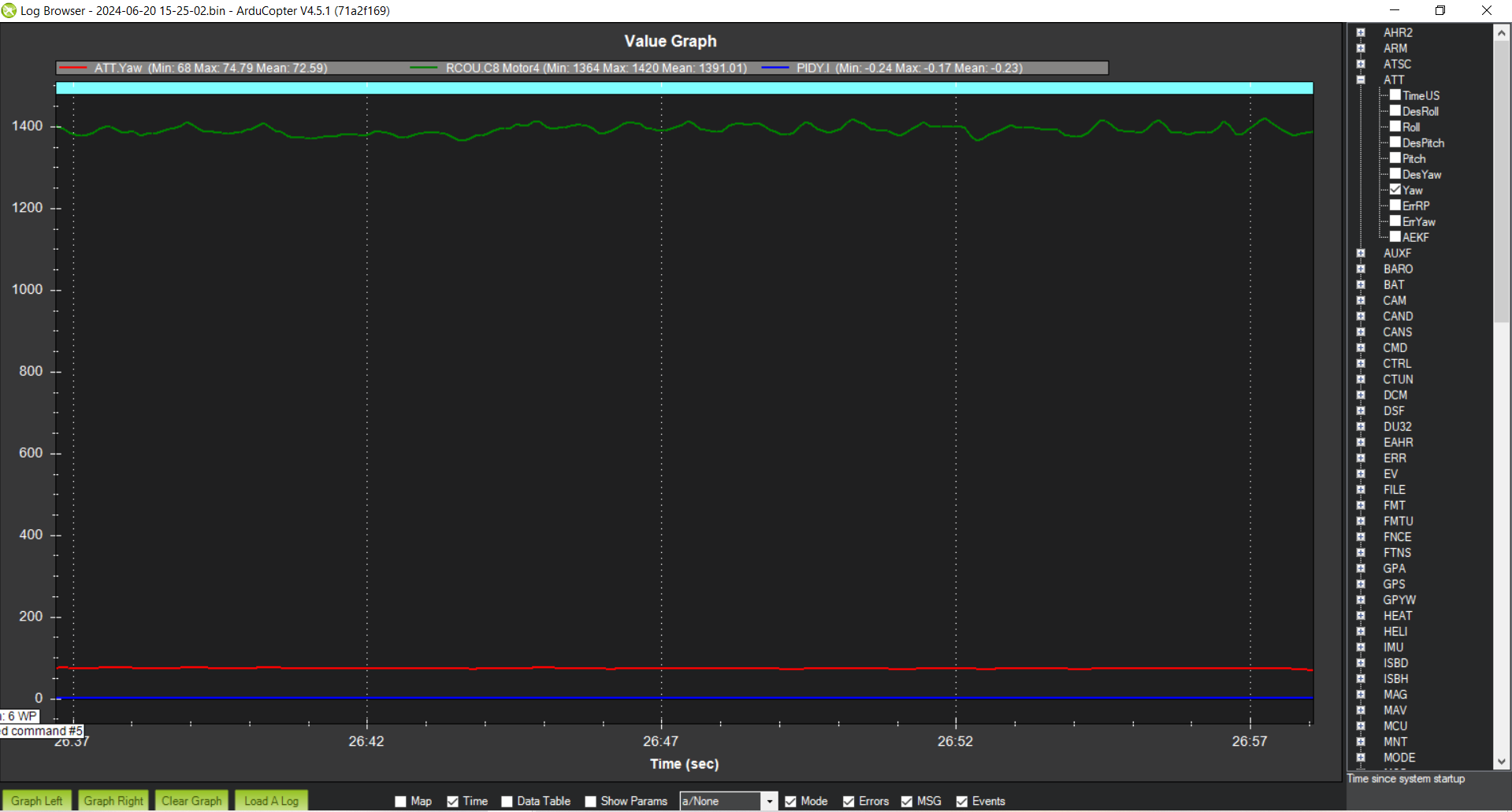
My Yaw I scaler is maxing out in the wind. I figured I increase my ATC_RAT_YAW_IMAX from 0.33 to 0.50 or so. And maybe increase the decay rate of the I-leak. Not sure where that parameter is though. Would this be the correct way to handle this, or are there other parameters for dealing with wind specifically?
. . .
Or, maybe I need to increase my I-term. The tail trim is set to 1400 PWM. The I-term is still pretty low even when hovering near 1400 PWM for the tail servo.
The I-term is negative whether the PWM output is above or below 1400, which is a little confusing to me. I guess it is leaking off slowly though. This tells me that the I-term should be increased to increase the rate of change for error correction.
Also, a related concern is with fast spool-up when bailing out of auto-rotate. How would I tune parameters to provide a fast tail response for fast spool-up? Seems I would need to clear out the I-term, and have a larger D-Term in the moment.
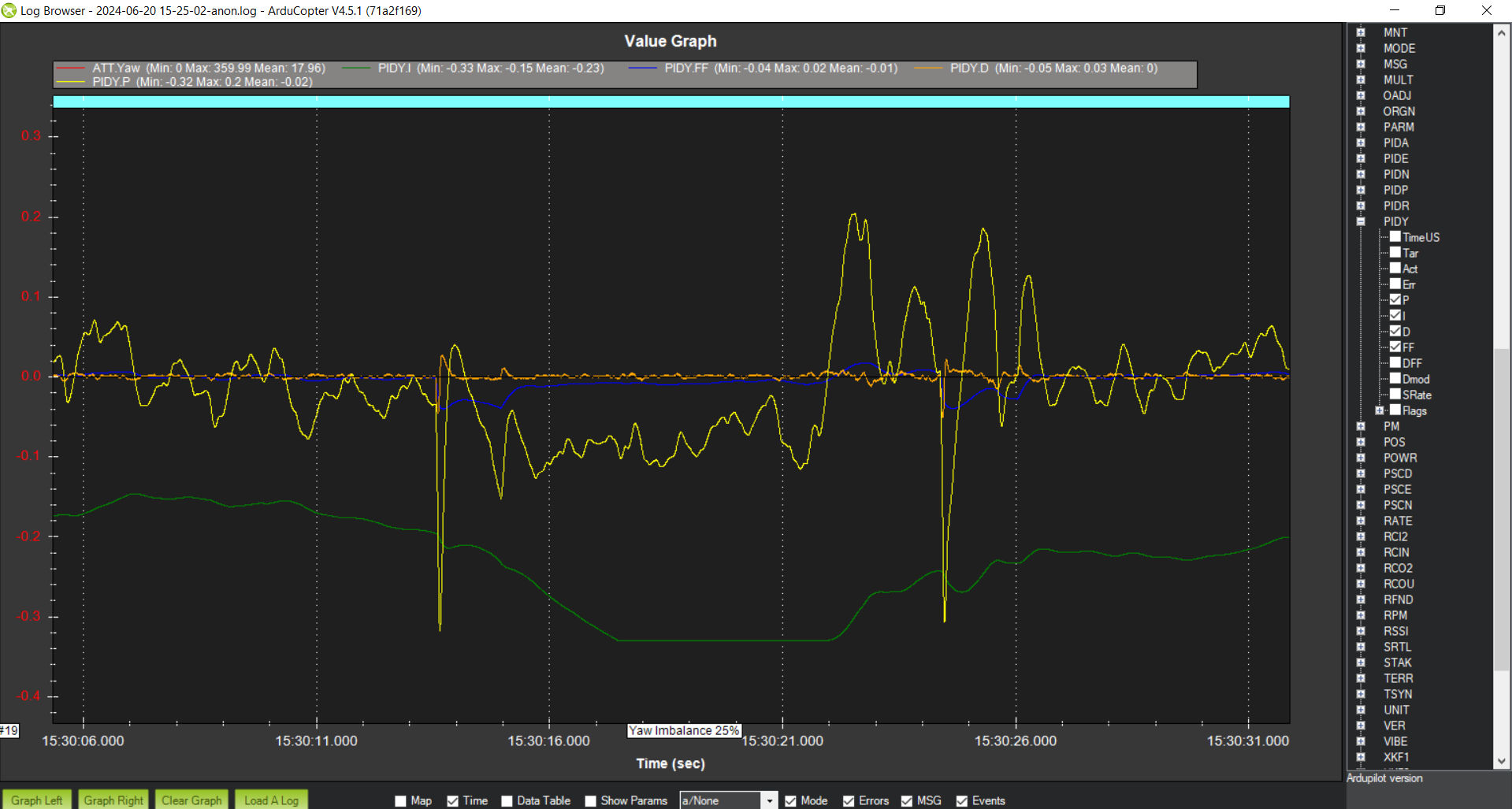
I increased ATC_RAT_YAW_IMAX from 0.33 to 0.5. but left the ATC_RAT_YAW_I where it was at 0.12.
This helped avoid Integrator I saturation. Looks like I should increase IMAX still, probably to 0.8.
Now, I’m unsure if ATC_RAT_YAW_I gain should also increase, or possibly decrease. My thought is that if it is increased, that means more authority to correct actual yaw error, with less change over time required, meaning that less time is required for the correction to be made. Is this assumption correct? That a higher I-gain will be quicker to respond to change?
I’ve doubled the I-gain from 0.12 to 0.24. The yaw has a little overshoot now, and some twitchiness. Seeing some oscillations in the P-gain, so P-gain should be reduced.
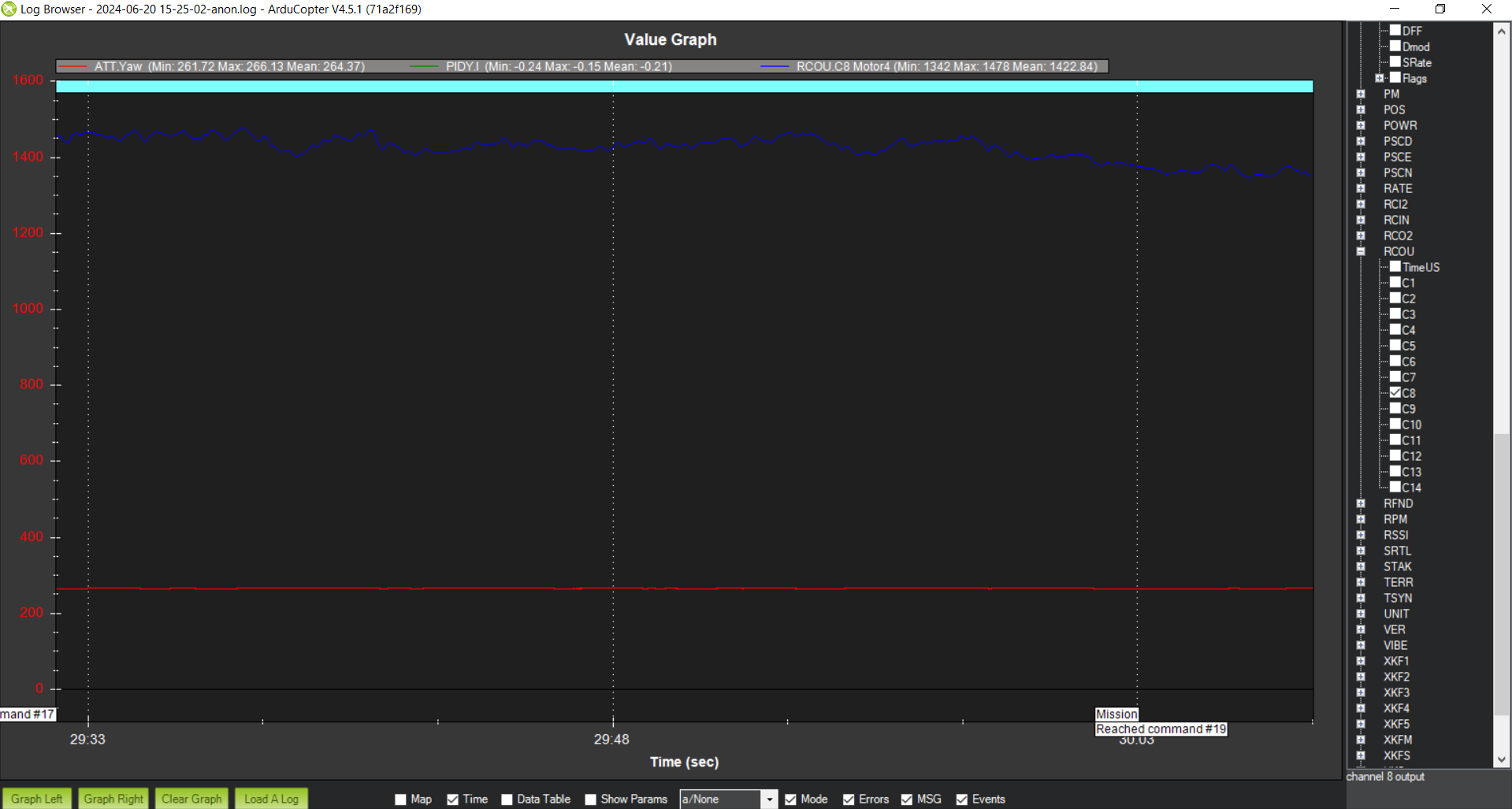
Also having a hard time understanding why the I-gain is offset relatively far, even when the tail PWM output is very near the PWM trim value. I guess I’ll set the trim higher. 1420 is the overall average PWM. I am in some wind, but this offset has been consistent.
Hi Derek,
Instead of guessing with manual tuning, why not use the autotune feature. I would set the gains back to what you originally found in manual tuning. You can do the FF gain tuning but that typically can be set to zero. The rate P and d tuning sequence can accurately set these gains according to the desired max gain parameter. I think you should start with AUTOTUNE_GN_MAX of 1.0. Then have it set the angle p gain with the AUTOTUNE_GN_MAX set to 1.4. As far as the I gain, I have it set it to 10% of the Rate P gain. You can make that higher but I think the rule of thumb on that is not to exceed the rate P gain.
After you complete the tuning of the yaw axis, perform a tune check sequence so we can see how it looks.
Okay, I’ll go ahead and learn the autotune feature. I would like to verify how to calculate the max gains for myself before going through this procedure. That is, I would like to find out what my current maximum gains are. Do I simply add P, I, D and FF rate gains together? For me, after manual tune, that is currently
P + I + D + FF (0.28 + 0.12 + 0.003 + 0.028 = 0.431) for Yaw. Do I really want a max gain of 1.0 for yaw?
That’s not how it works. The autotune max gain refers to the response gain which is the output (angular rate) divided by the input (requested rate). The autotune feature looks at the response gain across specified range of input frequencies. The desire for a good tune is to have the output match the input up to as high a frequency as possible. When you start seeing overshoots in the response, that is indicating that the output to input is not 1 to 1.
Look over the autotune wiki and come back with any questions.
Okay, I just did an autotune for the tail Rate-D and Rate-P gains. It failed, maybe due to the wind. I’ll try again. What determines a failure? I gave it plenty of time to tune, but it decided that it had failed during the tuning process.
as for the I-gain offset I was seeing earlier, that was due to my H_COL2YAW = 1.0. I ended up setting this back to zero for best results.
I completed Auto Tune for the Yaw Rate-P ad Rate-D gains. It seemed to remain in the dwell state for a long time. I had to interrupt to bring the helicopter back. After the interruption, it did not return to tuning. Looking at the data, it appears that it was actually finished tuning. The final P-gain is 0.5! which is much higher than your recommended P-gain value during manual tuning. The yaw feel is nice though. Could it be that this heli, having a tri-blade main rotor, and only a two-blade tail would require a higher gain than a typical two-blade rotor heli?
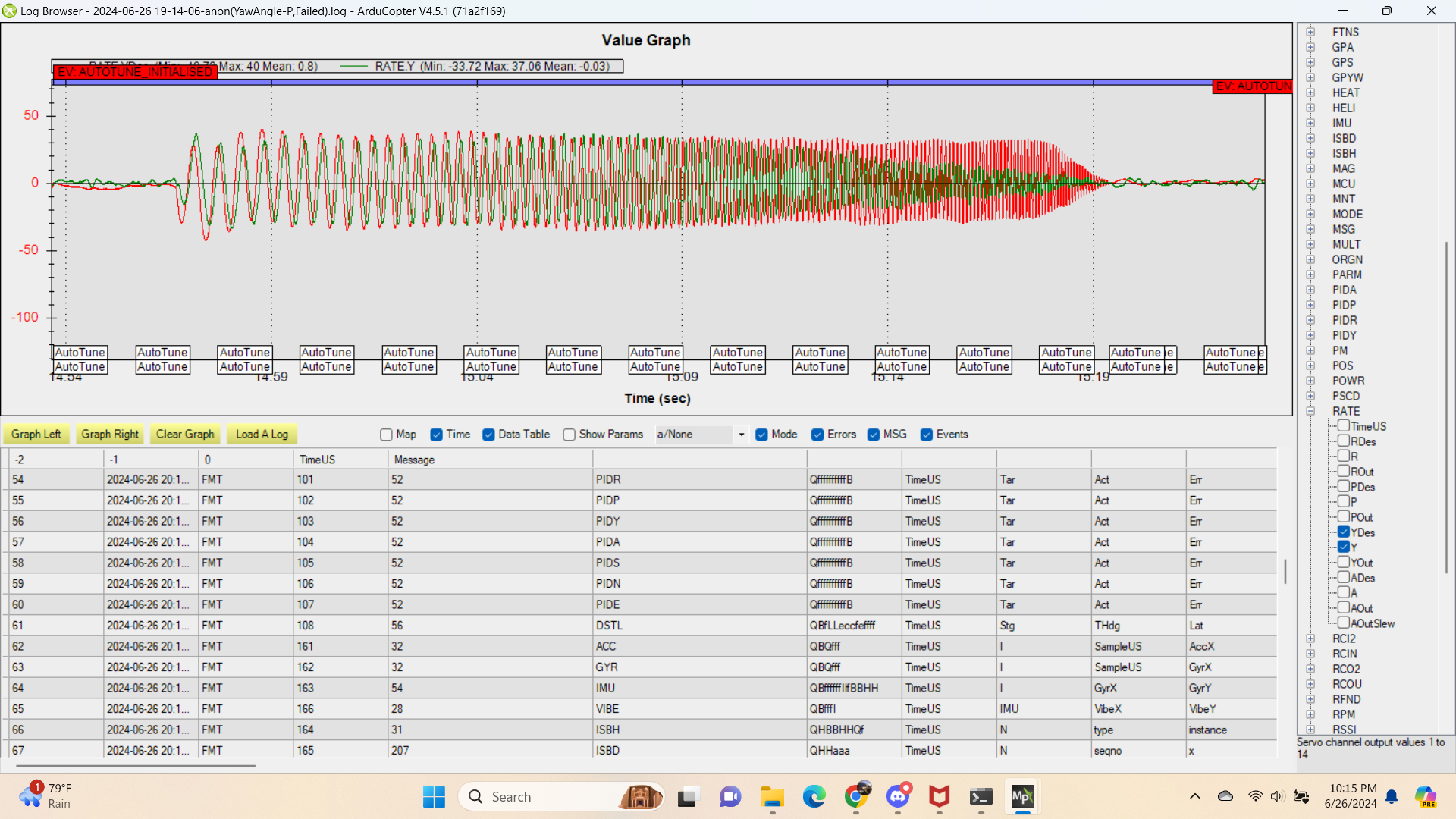
The angle-P tune failed. Looking at the data, it appears that I need to begin with a lower frequency. That the gain only decreased from the beginning. Angle-P autotune log (failed)
Yeah, I have seen it able to tune to higher than expected gains in the yaw axis. I got the recommended value for manual tuning from a previous heli dev from his experience. I didn’t have much experience with yaw tuning. I rely mainly on the frequency response to tell me when its getting close to instability. There could be other considerations like actuator workload where it is being driven pretty hard.
So this is the frequency sweep done during the angle p tuning which includes all of the rate p and d tuning. The desired and actual rates are about equal in magnitude at the lower frequencies.
So the error with the autotune of angle P was due to a frequency exceedence again however this was due to the min frequency not being low enough. I would suggest the following for the min and max frequency for angle p testing
AUTOTUNE_FRQ_MIN 2
AUTOTUNE_FRQ_MAX 50
Run the angle p test again. It is looking for the maximum response gain and then dwells at that frequency while it raises the angle P gain. It stops when the response gain exceeds the AUTOTUNE_GN_MAX parameter.
The wind calmed down, so I performed another Yaw Rate-D and Rate-P autotune. The frequency of the dwells was much higher. In fact, It may have been a little hard on the heli. It came back with higher rates:
You might notice my autorotate bailout test afterward, where I spool up and spin the heli in a 360
I am concerned about performing autotune for pitch and roll. I don’t want things to get too violent for this large helicopter. I would expect also that it will take a very high frequency to get the response out of phase by 161 and 251 degrees. The servos I am using are extra high torque and extra high speed. This will for sure cause a tighter phase response.
What are your thoughts? Can I reduce the required test phase values to tune at lower frequencies?
. . .
In this last Yaw tuning log, I see that the tuning sweep process goes all the way to the maximum frequency, even if the out-of-phase goal is met. Maybe I could have left the frequency at 70Hz after all. The phase reached 251 degrees at about 60Hz during this latest test.
So this is where you would limit the acceleration to what the aircraft can withstand. I am just finishing up a rework of the autotune feature to make it better for larger aircraft. You can set accelerations limits to keep from pushing the aircraft too hard. However it is difficult to figure out for the user what those values should be. For companies using this, they might have calculations to say what there max allowable acceleration is and therefore can limit it. The feedforward test in this update is gentler and maintains much lower attitudes (< 10 deg). This update will come out with 4.6.
As for your yaw axis, I think you could go back to the previous gains. Then do your angle p test with the frequencies I suggested.
no, you can’t change the phase that it uses to determine the max allowable gains and tunes at. These are chosen for a specific reason. Is this an aerobatic heli? have you increased it’s weight from it’s design weight. If it is an aerobatic heli and the weight is the design weight, then I would say that it can probably handle the tuning. At a minimum, you can just do the max gain sequence. that gives me enough to figure out where your gains should be. However, this needs to be done with the rate P and D gains at zero for pitch and roll.
These are the ATC_ACCEL_x_MAX parameters, correct?
This is NOT an aerobatic heli. It is intended to be used as a heavy-lift drone for agriculture use. It is at its basic weight of 30 lbs. Tomorrow I can go ahead and perform the Max gain sequence with rate P and Rate D gains set at zero for pitch and roll.
Well they don’t change anything about autotune currently but in the update there will be separate Params that you can set to have autotune limit the accels
Autotune would do better as well if I start with P and D gains at zero, correct? Looks like it always moves the P and D gains upward from their current settings during tuning?