I do not understand. The Bi-Wing has two in the diagram are showed 4 Mots.
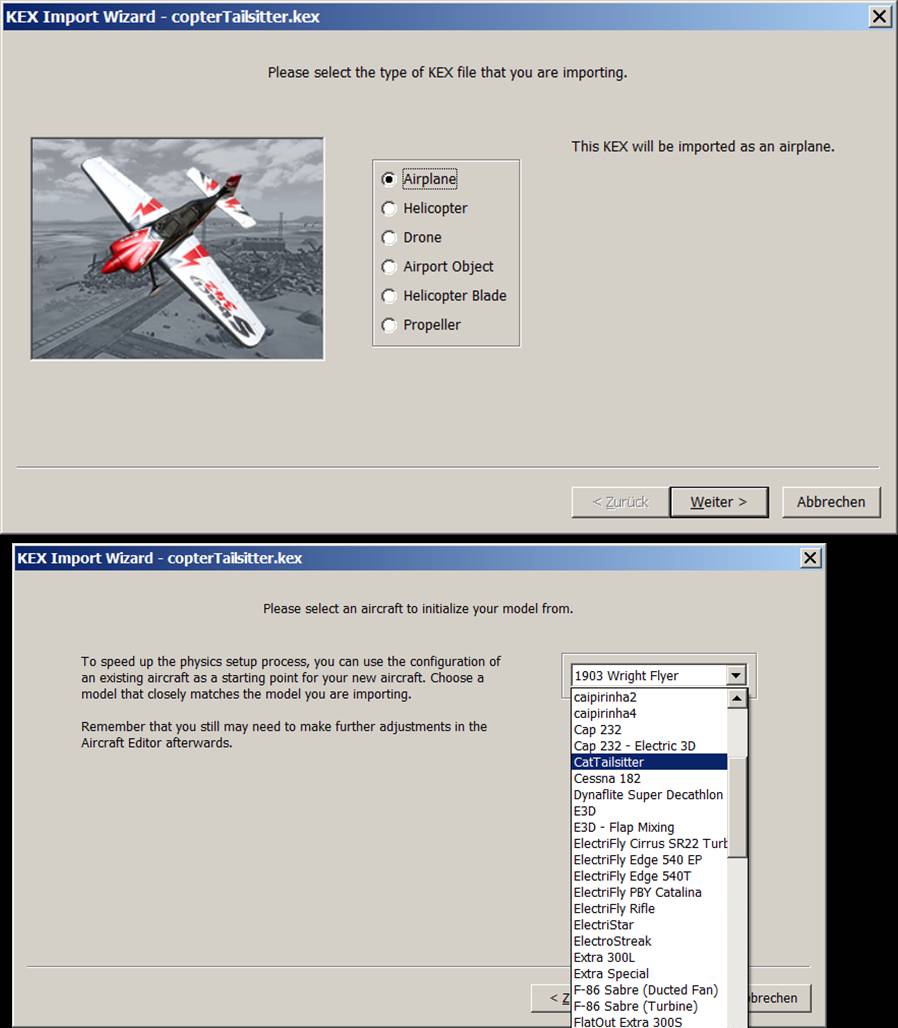
Yes, after weeks of varying the geometry in 3D Max, finally I could import the FBX File. Because I didn’t find a method to make the yellow wings vertically, I choosed at the beginning of the import procedure the
Airplane and selected the model CatTAilsitter_EA.RFX https://github.com/ArduPilot/SITL_Models/tree/master/RealFlight/Tridge/TailSitters/Cat
This model I designed for Tridge in 3D Max, sent the FBX File to him who completed it. And no idea, how it made it vertcally. Then I edited the CopterTailsitter FBX and modified the measures of the wings according the coptertailsitter. And added 2 more mots and servo 5 and 6 for it.
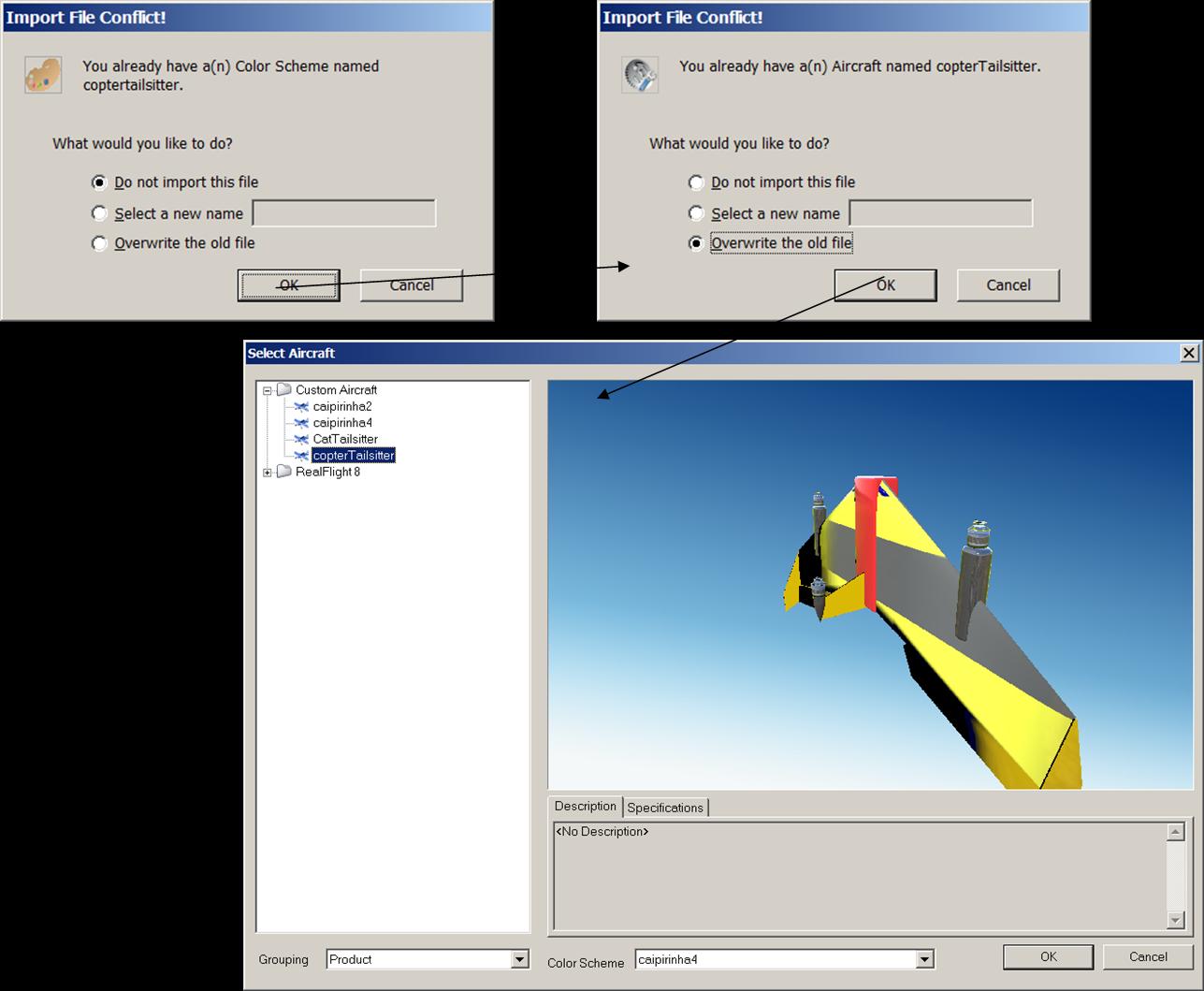
Safed it finally happy and exited the Editor. And then wanted to see the result. Just a jump of 2 m and again the window with the message and crash.
I tried two different PC’s with RF8, both showed the same error when exit RF8.
An shortly I contacted KnifeEdge and the answer could not be stupid. Are you saying the program is freezing and the selections are being grayed out? When you installed was security running on the computer?
Thats help, or even more: Turn your PC OFF and ON again or so.
By the way, I’ve never such issues with one of my 90 Programs, such as Video processing or 3D-Animations with 3D Max.
Pity, it would be fun.
@lorbass Could you rotate the graphics in coptertailsitter.fbx by 90 degrees in pitch (nose down to horizontal)? I think the Realflight physics model will then match the graphics. I couldn’t figure out how to do that with 3DSMax.
Sorry about my bad question, I didn’t read it attentively.
I dit it, you may find it here. But you will have to rename it to copterTailsitter.FBX (delete the Hor)
So you can use the same .TGA File. (must have the same name as the .FBX File) https://drive.google.com/open?id=11Zyglu4redVfoMWGvx6UNCel9QcRihNI
But I assume, the “Tailssitter” will then lie on its belly on the grass.
Later I will make some Screenshots to show you how I did it with the CatTailsitter.
By the way, 3D Max is a huge Tool. The manuals contain 10 000 pages. It was used to made the movie King Lyon. I work with it since 20 Years, at this time the price was 3500 $. We used it to make Photorealistic Images long before we started the development of a Product to get the meaning of the consumer. Nearly the same process as you do it with the Simulator.
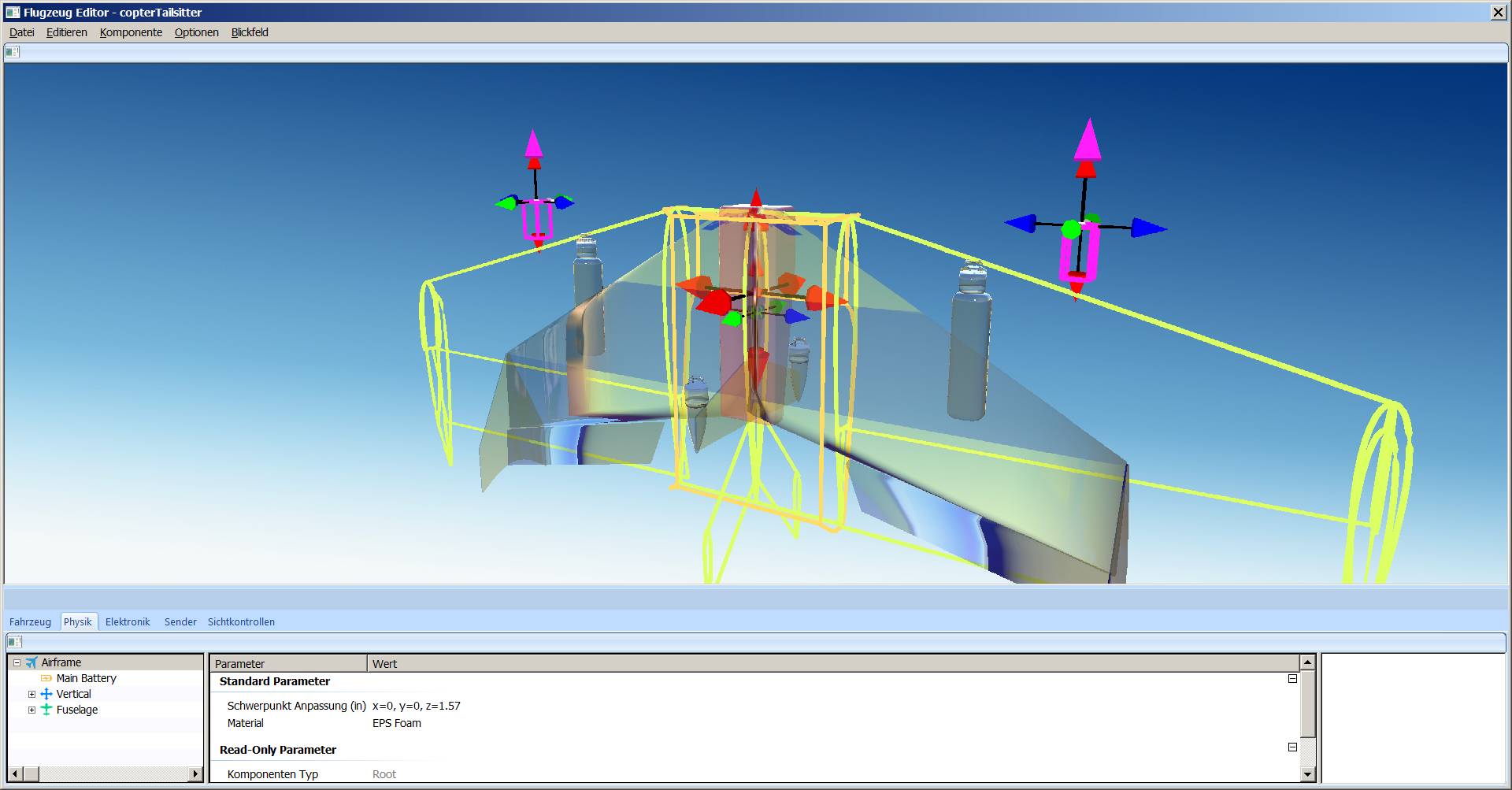
From here I started editing to adjust wings and mots. And then added the upper, lower mots.
Will try it a second time, with different safed states to see which objects produce the crash.
Good luck
Edit, because not possible to reply a third time following?
I started again, and arrived here.
But of course, not controllable without your FW
May be you need to adjust the motor/servo assignments.
And no idea, why RF8 does n’t crash again as already used to.
Thanks for creating the RFX; it imports for me and looks good, except that I haven’t been able to make it hover yet. It seems as though AHRS_ORIENTATION must be non-zero for this version. I’ll let you know if I can get it working; had it flying in FBWA at one point, but now I can’t reproduce that.
I tried importing your first KEX again, (I did it the same way you outlined above both times) and it didn’t have the problem with the 90 degree rotation of the physics… But now it crashes RF8 every time I try to load it, so there is definitely something inconsistent with RF8’s model importation and I have now seen crashes on windows 10. I also recall (now) that @MagicRuB had reported that certain RFX files caused RealFlight to crash on loading.
I guess, as you mentioned above, there must be certain 3DSmax features that RealFlight can’t handle properly.
Yes, 3DS Max support powerful modificators to build complex Objects. For me, an overkill to use such a sophisticated and therefore expensive tool for RF8.
I suspected that RF8 crashes when the Objects are complex and used simple commands only.
Also I maintained the requested convention for naming, orientations and linking.
Here the first File (vertical) where I simplified the motor carrier and I got to the end.
What about hovering with the CatTailsitter, this was the base of my work?
And did you assigne the top/bottom motors/servo in RF8 as requested? I do not know how and selected
Servo 3 and 4.
Would be nice, when we could make it flying, because I already have prepared the Bi Wing in 3D scratch.
Congratulation for the biwing 3D. When it will fly it will be interesting to test airfoil, wings respective pitch and position, CG… if not too much work.
I think you requested the copter + motor layout:
right is motor 1 : servo number 33
left is motor 2: 34
bottom is motor 3: 35
top is motor 4: 36
I hope not to mistake. You can have to look at the quad + motor layout in arducopter wiki. To find the servo assignation number I usually look at the full parameter list, servo parameter
If you want to enable yaw control with differential thrust (q_frame_class=0) you will have to set both wing motors CCW and top + bottom CW. If you disable differential thrust (q_frame_class=16) the best is probably to keep wing motors rotation just as a TVBS and for top and bottom just set them opposite.
If you mean the green Pic, thank you.
I admire your innnovation and teamwork with @kd0aij
But it was just a 1 hour draft in 3DS Max to show whats possible and to hear if it would be useful. In this case, I would like to do it more precisely and need more details. Mots kv, Props, CG, vertical Distance of the wings, hor. Distance of the Mots, Mots Nr., (left top, right top,…)Elevons top, bottom or both, Wing chord (28cm) with or without elevons. Elevon Dimensions, (sorry I do not know much about aerodynamics.)
CG, Profile, could be editet easely later in RF8. (if no unexpected error in RF8 and Crash)
All details hereafter
sunnysky 2212 980KV on 4s battery
graupner electroprop 10x5
motor 1 is bottom right (view from rear) CCW (rotation view from front)
motor 2 is top left CCW
motor 3 is bottom left CW
motor 4 is top right CW
horizontal distance between motors = 70cm
vertical distance between wings=28cm
horizontal distance = 14cm
wings cord=28cm with elevons, wing span 100cm
JWL-065 airfoil
control surfaces: 6.5 x 30 cm, start at 1.5 cm from wings tip.
CG vertical position : 14 cm above lower wing
CG horizontal position : 11 cm from leading edge of lower wing
fuselage is a symetric airfoil which thickness is increased to 17%. lower cord is 40 cm and upper 26 cm. Fuselage leading edge is 4cm behind wings leading edge
weight is 2100g with 4s 5Ah batterie
Verry accurate. Seems to be material for two Bi-Planes
Fuselage leading edge 4cm behind “lower” wing? In poste 27 I saw it more in front of the lower wing.
Will start to “reproduce” and come back.
@losawing, @kd0aij
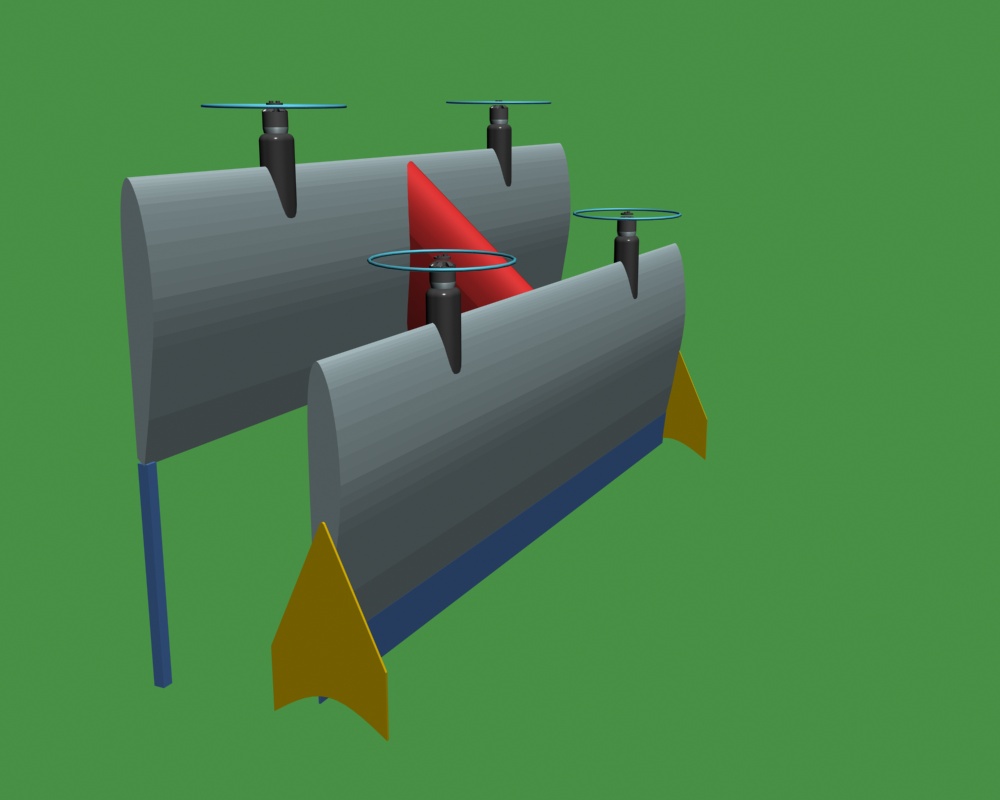
Just an intermdediate info. Bi-Wing Tailsitter now ready to edit in RF8.
Had a lot to fight against the ugly shiny surface. Now the next step, will try to complet it as possible. I was criticized because I used more than 20% of space in this thread. Must be shorter in future???
The white and red colors looks better than mine. This is a first good point.
From time to time I get also some criticism, I think they are automatic routines that do not matter.
In the meantime I finished Bi-WingTailsitter as far as I can. I assume, the servos have to be defined (I defined all Mots to Servo 3) according the needs of SITL. When pushing the Throttle stick, it jumps in the air and crashes.
Not any know how about the implementation in SITL yet, therefore not tested SkyCat.
Here:
I’m happy to won against the ugly reflectiv surface. Now I would ralize it within 4 hours.
But no idea, why no props are visible and no Mots are turning. Must be special in vertical position.
Yes, the surface textures are looking good now.
I’ve tried to find a set of servo directions and motor assignments that will fly, but have had no luck so far. It’s difficult because I can’t see props spinning, and for some reason it seems as though the elevon visuals aren’t moving, although it looks OK in the editor (the physics elevons move).
The CatTailsitter has good propeller visuals; is there something different in the way those were done?
@losawing Discussion of the gainscaling PR https://github.com/ArduPilot/ardupilot/pull/12869
on this week’s devcall brought up some confusion on my part with respect to roll and yaw rate scaling in QSTABILIZE and QHOVER modes with Q_TAILSIT_INPUT=2 and 3
I don’t suppose you have done a lot of testing in those modes except for hovering with the nose close to vertical, but there should be some improvement with the latest version of the PR for general flying around in high-alpha and pitching up/down while rolling and/or yawing.
New binaries are here: pr-gsc-base
I’d appreciate it if you could flight test QHOVER and QSTABLIZE with large values of Q_ANGLE_MAX and look for possible regressions.
I have been flying with q_tailsit_input=3 for several months with lean angle up to 80° and I am very happy with it. I never tried input=2. Some questions:
Is tailsit_input parameter active in q_acro mode.
Is interpolation gain scaling method still in this PR? Same question about q_assist.
Do you confirm I have to set q_frame_class=10, q_tailsit_gscmsk=1 for boost and 2 for att and throttle.
The weather should be good enough for some tests this WE.