Nice looking model. Are you planning to add it to the SITL_models repo?
I made it about 2 years about as vectored Tailsitter for Tridge. I don’t know if it worked it was not the best
idea that I made the designe, Tridge the Test with comment, and redesigne by me and test… and so on. Therefore Tridge installed also the 3DStudio to do it by himself.
For me its difficult to test, because my RF8 makes troubles on different PC’s. It needs to edit the model, but everytime when I quit edit, RF8 crashed. And no answer from RF8 support. I was used to develope MS Flight Simulator Aircrafts, Landscape, Airport, Panels and Gauges. But was frustrated about the quality of RF8 and stopped to use it. Below a Pic of my setup, approach cologne (Germany) airport at night.

3 Likes
Very nice simulation setup!
The CatTailsitter in SITL_models flies, but it is extremely difficult for me to hover in QACRO mode. Not sure exactly what the issue is there. Here’s a short clip of qhover mode in RF8 with my version edited to match @losawing 's Batwing and flying with my gainscaling PR:
Yes. this cat I made from the data of a real non vectored tailsitter from David. Nice to see it in the air.
As I knew, it was difficult to fly even in QStabilize. David tried to find the reason and worked with different CG.
I did the 3D Design only, and Tridge the nescessary for RF8.
Motivated by your question, I had a look to my last project for the simulator.
Also I hoped that the “Exit Editor” issue has solved in the new update in the last 18 month.
This is not the case, when exit Editor the title menu bar doesn’t work anymore.
The same issue is with all standard Aircrafts.
Here the last job “Called SkyCat”,a vectored Tailsitter, not ready to fly yet. Perhaps you can complete it if possible at this state.
https://drive.google.com/open?id=17Gzd6nfKdwTYHDApbGHZYLqxJtTNQJ7w
And the Params of the last RC Flight:
https://drive.google.com/open?id=14-2ggwSIAIUfexQvZ0sKoSk06lh_atuu

@lorbass Thanks for the model.
I was able to import and edit it in RF8; no crashes 
I don’t think I changed anything in the editor, and it flies on Plane 4.0, though I wasn’t able to tune it very well. Maybe @iampete would have better luck.
Hello Mark, I must say thank you. Finally after hard working I could see the plane flying.
Did you use the params from my link?
About RF8 issue. After exit Edit the title menu bar doesn’t work anymore also with all standard airplane.
Also when nothing was edited. Just select in the simulator edit Aircraft, and back with exit edit.
And with Win 7 Ultimate and Win 7 Home Premium on 3 different PC’s. I will try to contact again the support.
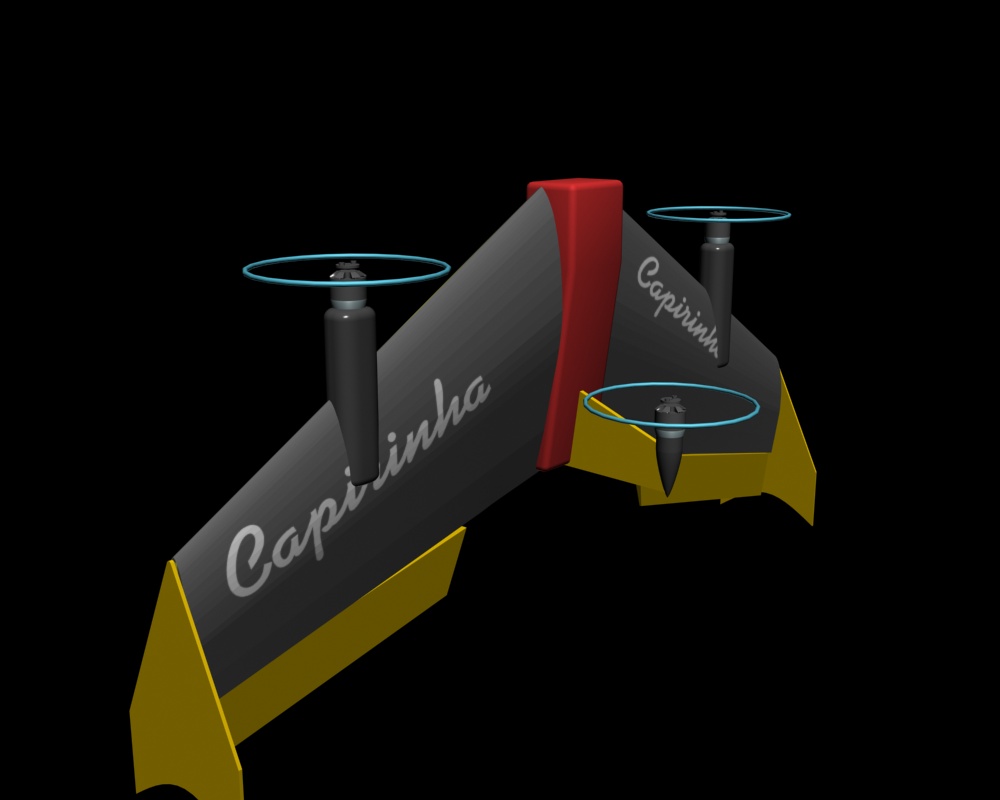
The side trip to the threads Tailsitter and Simulator showed me, that’s possible to make the caipirinha copter Tailsitter as model for SITL.
You’re quite welcome, and I’m glad to be able to help with this; I’d also like to be able to try your quad copter tailsitter, if you have done a Realflight version of it.
I started from scratch with the basic tailsitter params, then tried qautotune, but the resulting PID gains weren’t very good, and it crashed several times during tuning. There’s something weird going on with yaw; it seems very unstable in yaw and the motors are tilted significantly in opposite directions when hovering.
I put the params I wound up with here: https://github.com/ArduPilot/SITL_Models/tree/master/RealFlight/markw/Tailsitters/TVBS
along with my modified version of your RFX. I remembered that I moved the CG back 3cm while trying to improve hover stability.
I did try the PID gains from your file, but I believe the yaw gain was too low for a stable hover. Do you have any stability issues with the real model?
@lorbass Regarding RF8, I’m not having any problems with the Steam version on my Intel Windows 10 laptop with nvidia gforce gtx graphics. I don’t think I’ve seen a single crash or hang with the model editor since I installed it a year ago.
In this case, I will continue with the design to create the RFX. Just a question: How are the numbers of the motors (left, right, top, bottom)
My hover tuning was perfect, in Plane mode not yet.

I do hover tuning always in a Rig.
- no damage in case of (Like here at the beginning when a did it not in a Rig: https://youtu.be/KwYbkTRZ5lk
- can concentrate on tuning, not flying,
- Close to my eyes.
- no start, landing between modifying params.
Tuning in SITL would be easier, but I already heard from David (Palm369) that the behavior between RF8 and Reality is different.
1 Like
qacro flight with my biwing except take off and landing. Roll, loops, knives edge: possibilities are limitless, flight is comparable to a 3D airplane. Stall is impossible and control remain strong whatever speed or attitude. Thats a lot of fun in the serious ardupilot world.
3 Likes
Thank you for this airshow. Great performance (Wing and Pilot)
Otto
@losawing Glad you got the biwing tuned up; that is an impressive QACRO demo.
I think this video should replace the one on the “all supported vehicles” wiki page (search for “Quad Motor Tailsitter”)?
http://ardupilot.org/plane/docs/common-all-vehicle-types.html
Would it be OK with you if I also added to the wiki a detailed build page for the biwing design?
I’d also like to see what CG and parameters you used for this flight.
It’s a bit hard to believe that the simple throttle/attitude based gain scaling is working perfectly at all times, it would be interesting to see how much control surface throw is being used at high throttle and level attitudes.
this is the log of the video
I think you can read parameters from the log. Do you want them as a parameter file ?
For this flight I lowered q_a_rat_yaw_ff from 0.2 to 0.05 as you suggested to mitigate throttle pulses and that was better. Although I think differential thrust does not really make sense for acro, I keep it because yaw authority is higher and this is better when the aircraft is prop hanged.
I had gain attenuation mask =2, max throw of all control surfaces is about ±40°.
Ok for changing the video on the wiki page. I am proud that one of my plane is shown on the wiki.
Ok also for the built page. What can I do ? About the CG I found lately this page
https://www.ecalc.ch/cgcalc.php
I made the simulation with the help of ecalc
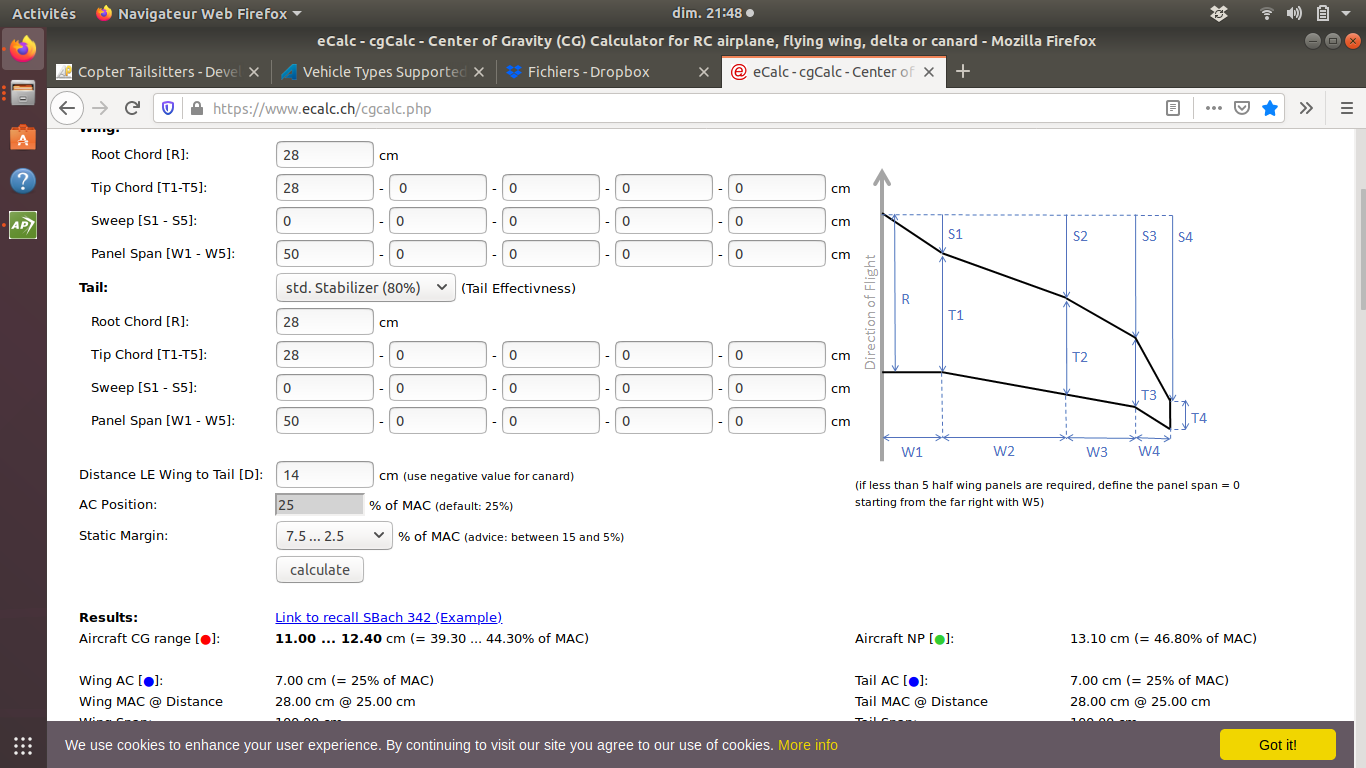
and found the CG position I have, 11 cm from the leading edge of the front wing, correspond to a static margin of 7.5%. That sounds good. I read somewhere that the rear wing of a tandem plane is submitted to a down-wash effect that reduce its apparent surface. I guess this is in accordance with the 80% coefficient ecalc use for the rear wing (stabiliser). If you are interested I think I can find the article about tandem wing stability.
The CG position also means that about 2/3 of the weight is on the front wing. So the front wing has 1° positive pitch with respect to the rear one. An airfoil with a higher lift coefficient for the front wing could have been a good idea (but not for acro).
I have also the answer to a question I asked at the beginning about the effect of elevator on the front wing as the center of pressure of this wing is only 4 cm in front of the CG. To measure the effect I changed front wing control surface from 4 (ailerons only) to 24 and 25 (flaperons) and put up to 30° flaps deflection while flying. I observed there where almost no effect on the total pitching moment so the answer is no effect. But that’s interesting to know that the Rutan Q2 has elevator on the front wing considering this is a real tandem with much more distance between wings.
1 Like
Thanks for the log, it has all the info I wanted to see.
I didn’t know there was an eCalc CG calculator. It’s good to know that it works for the bi-wing configuration. Interesting that the front wing control surfaces don’t generate any pitching moment…
The gain scaling is very active in QACRO mode, and (I think) the log also shows that it’s doing a good job of preventing oscillations:
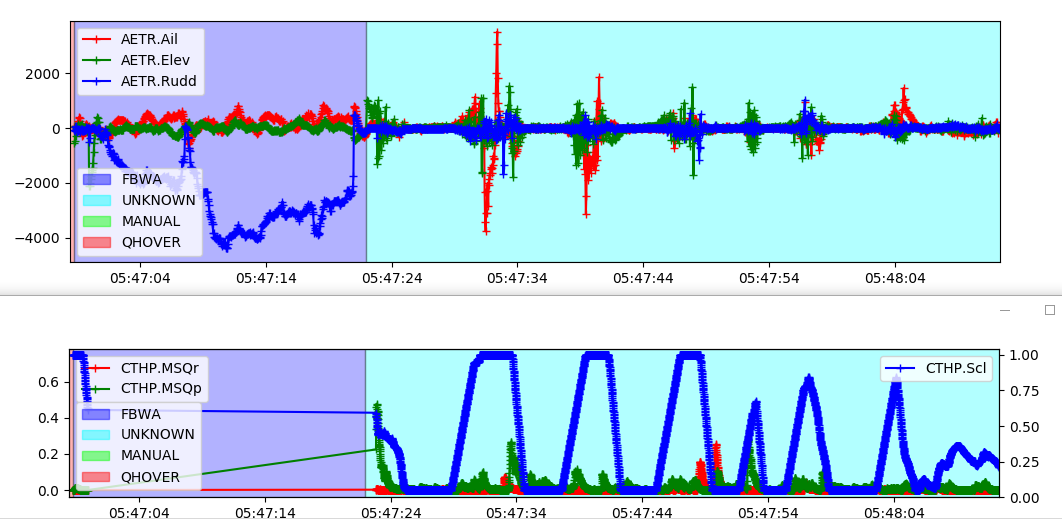
There’s a big difference in character between the flaperon and elevon outputs though:
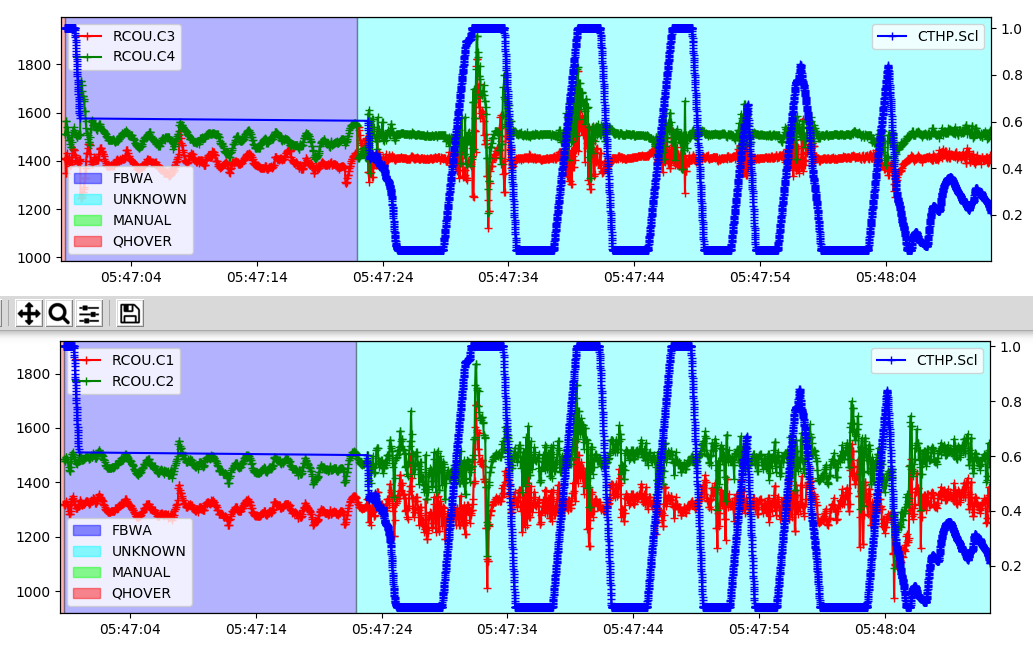
I’m not sure what’s going on with that, and it looks like it might be hard on the flaperon servos.
1 Like
@kd0aij
I’m at the end, not with the job but with the nerves about RF8. In the last 18 month I fogotte the annoyance but now I know again why I stopped to develope Models even it would make fun and I like working with 3D Studio.
The work on 3D Studio is easy but then to continue with RF8 nearly impossible.
I got alway the message: Import succesful, but when selecting my copterTaislitter, the program crashed with a message: Unexpected error and RF8 closed.
After days with trial and error I could finally enter in Edit Mode where I worked for hours with chords, engines and measures and so on. Then I safed the work and exit Edit Mode. But now after selecting the aircraft or entering Edit mode again RF8 crashes. When entering Edit Mode with another aicraft and then opening CopterTailsitter it crashed alsoe and therefore no modification to continue with trial and error.
Another issue is the ugly shiny surface of the wing, as already Tridge reported.
Never saw such a primitive Software in my life. Even the verry early assembler or compiler where better with reporting errors (e.g. syntax) in the olden days (45 year ago).
May be you have spare nerves an find out how to finish the job.
But because I can’t select the aircraft, I’ts not possible to export my work, sorry.
Here the Files to import:
TGA File
FBX File
@losawing I’ve been working on a subset of the pr-feature-tailsitter-gainscaling PR which is supposed to include only the features which you have been flight testing (the new gainscaling bitmask Q_TAILSIT_GSCMSK and max attenuation factor Q_TAILSIT_GSCMIN) and maintain the legacy behavior for tailsitter frame class 10. This minimizes the change to master and hopefully accelerates the approval process.
This is the current PR: https://github.com/ArduPilot/ardupilot/pull/12869
The downside to doing this is the possibility that I broke something or left something out, but I think the changes in this PR are both fewer and easier to understand.
SITL testing in RF8 with the quad Stryker and a TVBS with Q_TAILSIT_GSCMSK=2
looks good though, and I’ve put binaries here: pr-gsc-base
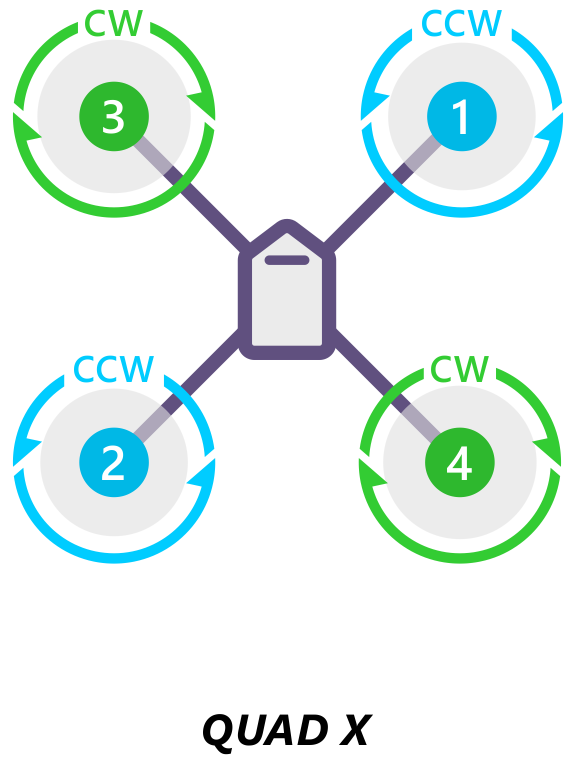
@losawing Are your motor rotation directions for the bi-wing the same as in this diagram: http://ardupilot.org/copter/_images/motororder-quad-x-2d.png ?
I imported your FBX file, and haven’t had any problems with the editor crashing.
But there is a 90 degree rotation between the physics and the visuals:
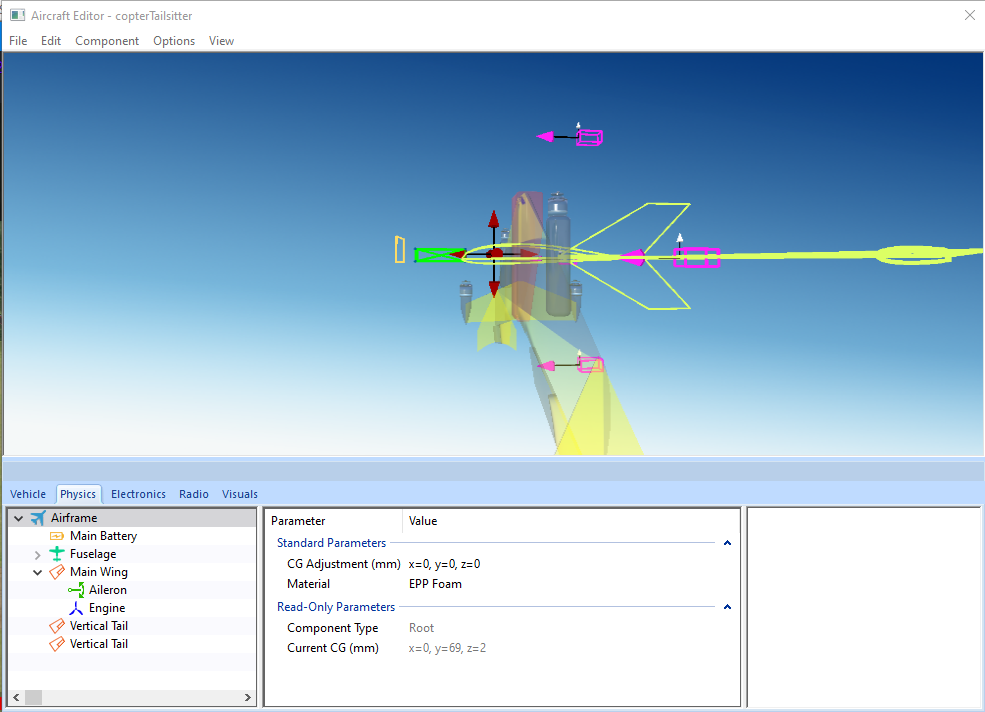
{kind=link}
It seems like it would fly if the rotation was correct.
I wonder if your system has a graphics driver issue with RF8?
yes, bottom right motor is number 1