Rejected? Or just don’t work? We fixed motor test on master fairly recently. If you running the stable version I would not be surprised if its still broken.
I haven’t tried it myself, but a rangefinder will be used in mode QLAND if available.
I ditched my first set of ESC’s after they quickly burned up during static testing (worst case situation). I have higher power handling motors and ESCs now. The first set seemed too fail a bit early for my needs. I’m also using dShot 300. The motor test is much more reliable. Might have been my learning curve or the old, cheap ESCs. Soon I will hook up telemetry for fun. Dshot is so much better than PWM.
Hey @kd0aij !
I’m trying to find params for quad tailsitter and couldn’t access this link. Shows a 404 error.
Can you please share link for Quad tailsitter SILT model?
Which link Shows a 404 error?
This link
https://github.com/ArduPilot/SITL_Models/tree/master/RealFlight/markw/Tailsitters/CopterTailsitters/Caipirinha_quad
But found the SILT params in master branch.
Unfortunately, all links like that were broken when @hwurzburg rearranged the SITL_Models repo.
I don’t know if there’s any simple way to fix that.
Hi all,
Has any one had issues with EKF3 on master recently?
Trying to track down a yaw issue.
Thanks
1 Like
Hey guys!
I’m trying to run SITL for Tri-Tailsitter. @iampete helped me figure out right frame class and type. But I’m not able to get AHRS to point 90 degree up during Q-modes.
This is my param file,
TTSAutotuned.param (23.3 KB)
This is my RF9 model.
https://drive.google.com/file/d/1iT9YfhRVeLlb5lq2bZ0cXikMmcvSQI-j/view?usp=sharing
Thank you!
Hi @Mallikarjun_SE
Could you post a video capture and a log showing the problem?
And what tools did you use to create the visuals for the realflight model?
I’ll share the video in some time.
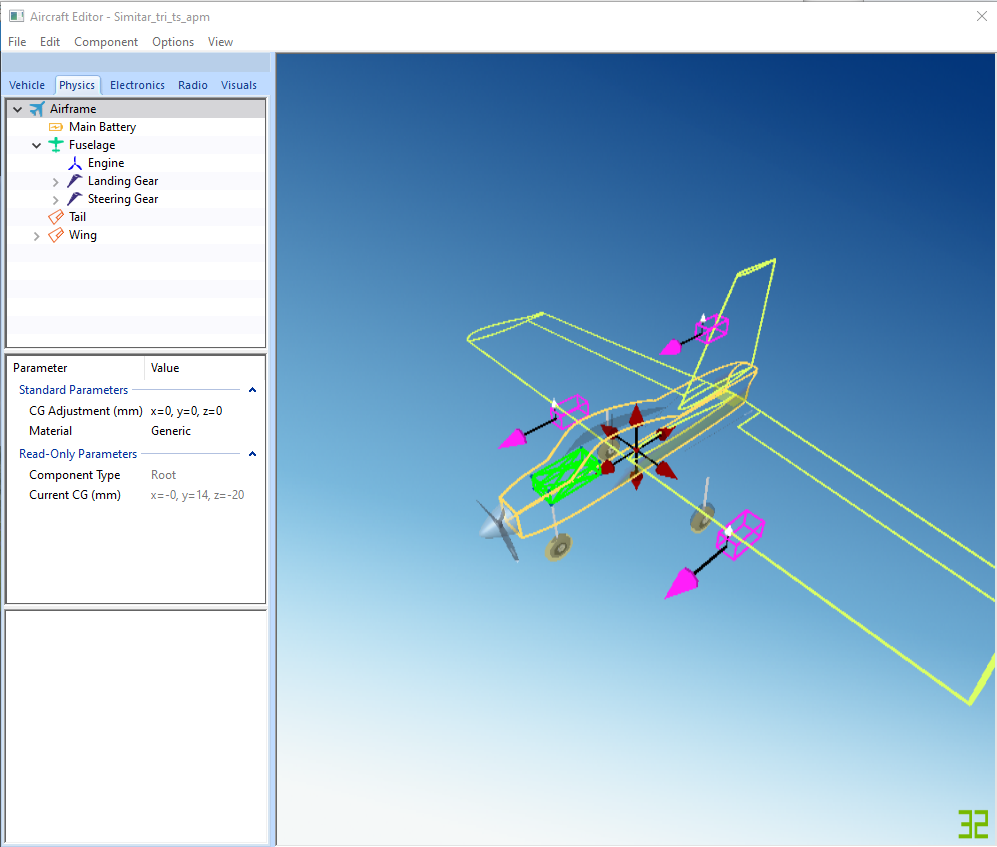
I used Solidworks for modelling and Blender for adding texture. I haven’t got time for making control surfaces move. But thought it’s enough for some initial tests.
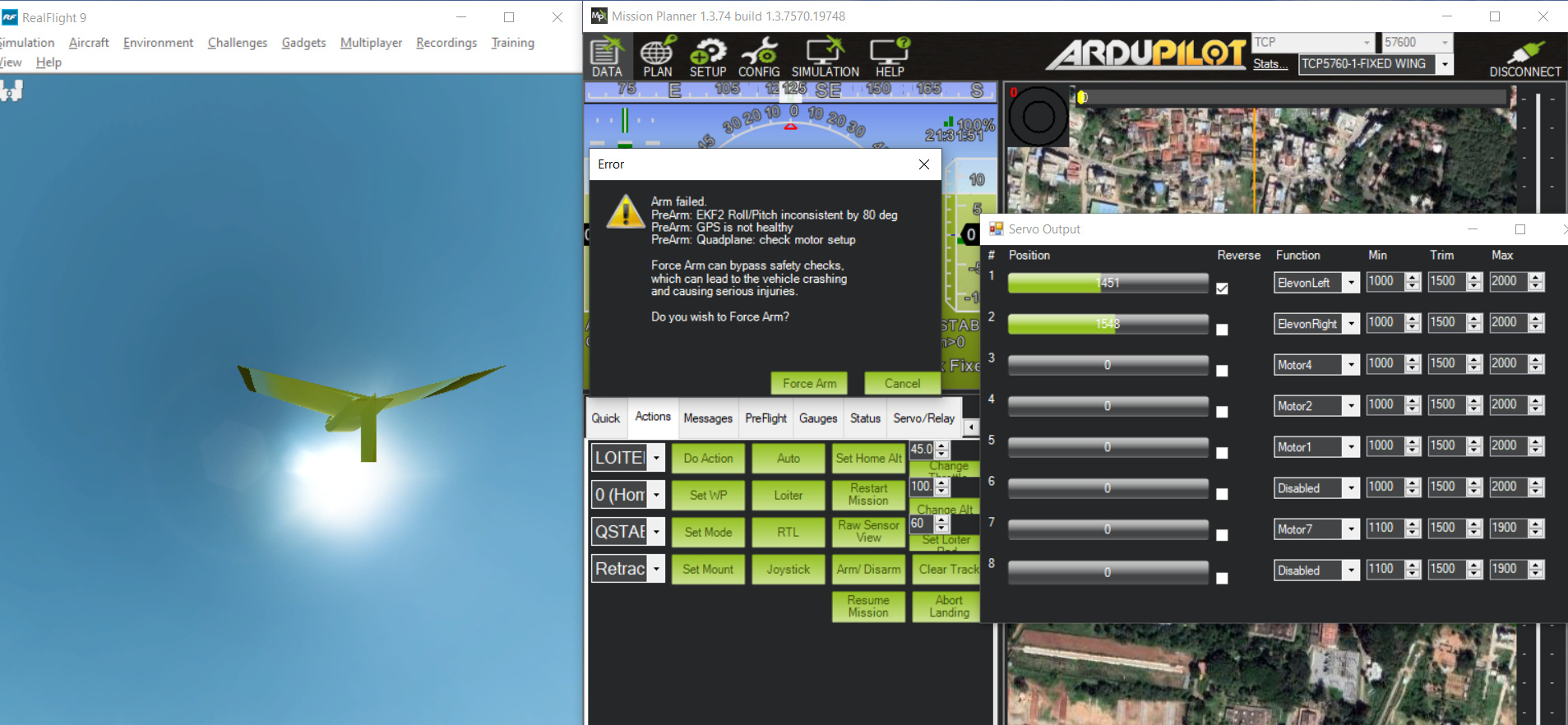
This is working after a reboot. But now I got hit with this error with respect to frame type and class initialization even after having motor7 for just initialization.
Opps, turns out that config is actually not supported in master, my bad,
Try this:
I just realized that we lost tricopter support for copter tailsitters when I removed AP_MotorsMatrixTS.
My Simitar_tri for RF8 still flies if I add the tricopter frame back in:
Will probably want to #ifdef the tri frame to be plane-only though:
I think we should support ‘tri-copter’ and ‘tri-motor’ tailsitters. ie one with yaw servo one without. Although thinking about it try are probably the same if you set YAW_SV_ANGLE = 0 for a tricopter.
Your matrix frame types via scripting stuff will make this all much nicer.
I had forgotten about the scripting option, that PR has been stalled for a long time.
For anyone who’s interested, that’s https://github.com/ArduPilot/ardupilot/pull/13693
Hey @iampete
How do I use this on RF9 SITL?
If you have the build environment setup you just need to fetch mine, or Mark’s branch.
git remote add iampete1 https://github.com/IamPete1/ardupilot.git
git fetch iampete1
git checkout iampete1/tailsitter_tri
If your using MP SITL then you have to setup the build environment so you can run builds. For realflight you want Ubuntu native, WSL1 or Cygwin.
I put binaries for my builds on google drive. here’s a link to my fix:
https://drive.google.com/drive/folders/1us-HDpX24K3neg2nWjo90rh99HqY2dgS?usp=sharing
The Simitar tri tailsitter looks like this: