I am really wondering how to configure this in pixhawk using arduplane. Could you please give me any data on that parameter configuration of this model?
I am very interested in learning more about this project and how you are using pixhawk to control the plane.
What are the changes i have to do if I want to use 8 motors instead of 4 motors.
If you have 4 pairs of motors on Y connectors (each pair corresponding to one of the motors in the RealFlight model), the servo parameters shouldn’t need to change.
PID tuning for roll pitch and yaw will probably be a bit different, but you’ll just have to do some flight testing to find the right values.
Thank you for your reply. I appreciate your guidance on this project. I will try this configuration on the model that I am working on. I have an idea to use high pitch propellers on the four wing tips for the cruise flight mode.
However, I have a question about the y-connectors. If I use them, I will not be able to control the motors individually. Is there a way to overcome this issue?
I believe that what you want would require a new frame type and modifications to the code in tailsitter.cpp. Or perhaps it could be done using scripting, but I’m not the expert on that.
You could try asking in the quadplane_vtol channel on discord:
We are developing a bigger swan-like tailsitter, with no control surfaces and 4 motors. Our project has a wingspan 1.7x bigger than the original swan k1.
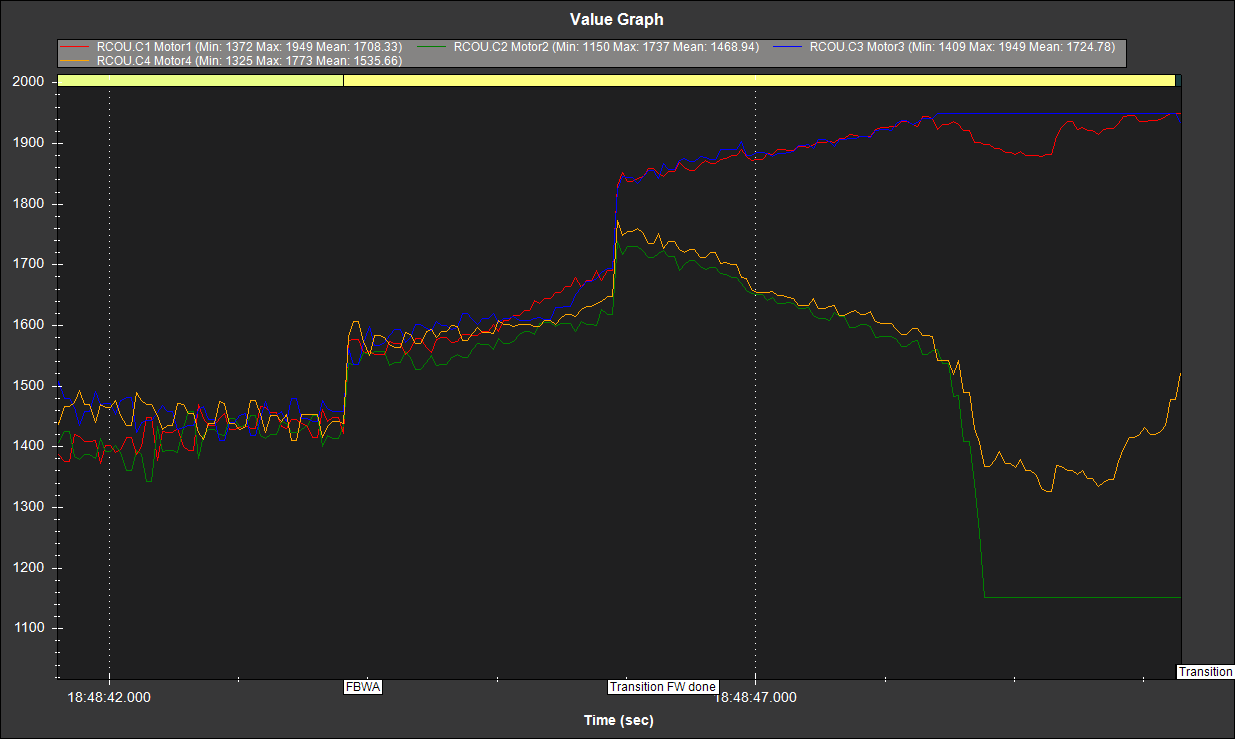
It flies really well in QLoiter, and we’ve tuned it a little already, but we are having problems on FBW modes. In our first attempt, the transition was successful, but right after the transition done message, the plane dove for 10 meters, level for an instant, and dove again. We managed to transition back to QLoiter and save the plane.
In our second attempt the plane went straight down after the transition. We can’t quite figure out what’s the problem.
I was doing the auto flight of the quad tailsitter and it went almost perfect. From takeoff to transition and cruise flight from waypoint to waypoint. BUT at the last moment in qRTl waypoint the quad tailsitter was descending way too slow and little off the home point ? I was scared that a 4s1p battery would sag too much and flipped it manually to qRTl and it landed perfectly. So right now it does not make sense that QRTL would work to bring it back but auto mission would have trouble bringing back even though the last point was qrtl. Can anyone check out why it behaved this way?
It came down slow because it went to Q_LAND_SPEED (0.5m/s) at 70 meters. This is because your VTOL landing way point had a altitude of 70 meters. When switched to RTL it went back to Q_VELZ_MAX of 2.5m/s because it was expecting to land at home (0m altitude).
Interesting, but why would it behave this way? I had the last waypoint as QRTL? Should it not slowly descend down to Q_RTL_ALT? I understand i set it to 70, but why would it not descend down to with fixed wing mode down to that altitude and then transition? maybe I set my Q_RTL_MODE wrong? How would you proceed to fix this issue?
The last waypoiont was a “VTOL land”. The idea is the same as QRTL but rather than landing at home it lands at the location in the command. If you want land at a location you should set the altitude correctly for that location. If you want to land at home you can use a “return to launch” waypoint to switch to RTL and then use Q_RTL_MODE 1,2 or 3 to switch to QRTL.