This topic is for discussion of development for “copter” tailsitters, which are tailsitters with multicopter motor geometries.
Previous discussions took place at Dual-motor tailsitters
This topic is for discussion of development for “copter” tailsitters, which are tailsitters with multicopter motor geometries.
Previous discussions took place at Dual-motor tailsitters
@losawing I added two new frame types to the gainscaling PR here:
and updated the binaries. The new frame types are:
MOTOR_FRAME_TYPE_NYT_PLUS = 16, // plus frame, no differential torque for yaw
MOTOR_FRAME_TYPE_NYT_X = 17, // X frame, no differential torque for yaw
Note that you will need to change your Q_FRAME_TYPE parameter from
MOTOR_FRAME_TYPE_PLUS = 0
to the new value of 16 to keep the previous behavior (no differential torque for yaw) for your existing quad tailsitters.
This is very fast, thanks.
So Q_frame type= 0 or 1 for differential torque and 16 or 17 for no differential torque.
And the last binaries contains also the PID update for additional filter. Correct ?
Tomorrow I will make a manual drawing of the tailsitter X frame I have in mind. This is something close to the opener blackfly. It will take around 2 months to complete the construction. Before that date I will test the last binaries on quad plus frame
Yes, the new binaries have the PID updates that are now in master
and frame types 0,1 are expected to have motor rotation directions as documented for quad plus and X.
It will be very interesting to see how a model like the blackfly performs. The 45 degree angle between fuse and wings seems like a good idea, giving a takeoff/landing orientation advantage similar to a TVBS.
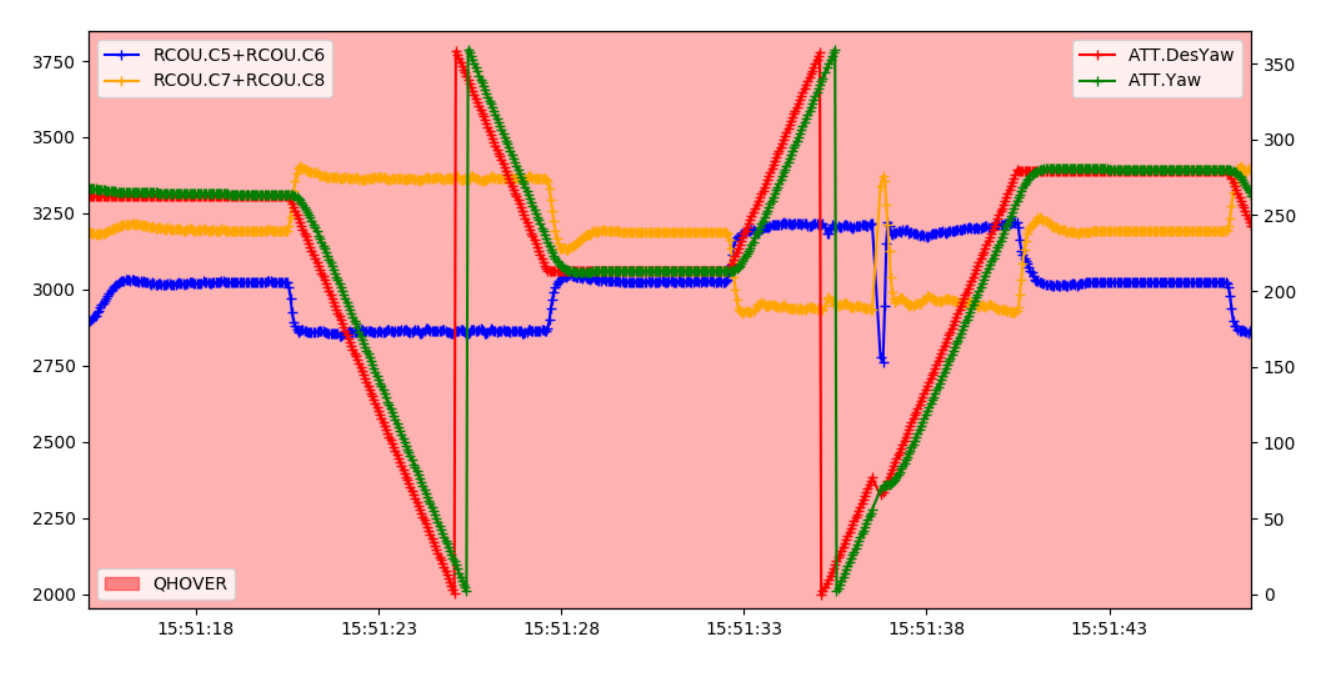
This is the result of a SITL run with the quad Stryker and frame type 0 with differential torque. It seems to fly just fine this way in both VTOL and FW modes. You can see that power to motor pairs 1,2 and 3,4 is increased or decreased based on the demanded yaw rate.
Yes awesome.
As a fixed wiing aircraft, the tandem wing is not a new idea. A recent example is the rutan Q2, an older one is the pou du ciel from henri Mignet
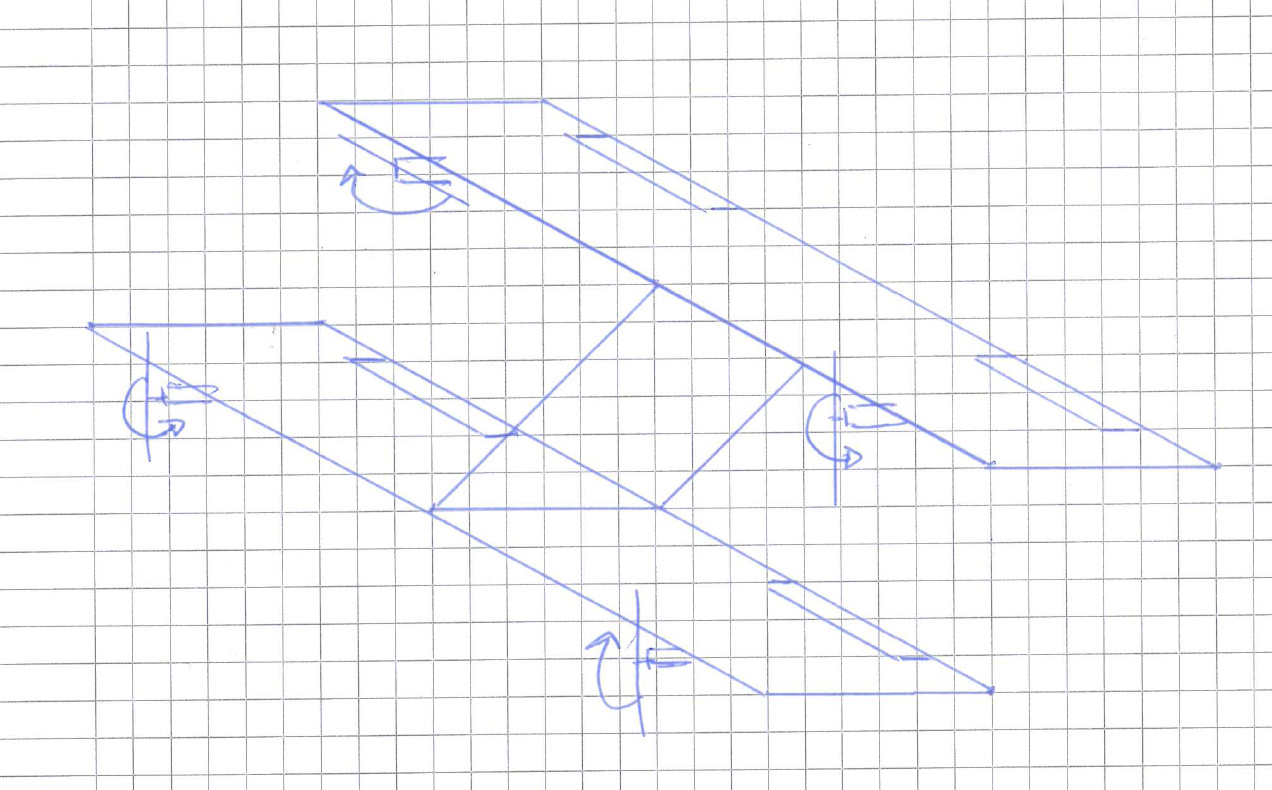
This is a first drawing, About 1 m span, top and bottom wings identical, jwl-065 airfoil for stable Cm and high lift, 2212 motors with 10 inches propellers, 4 control surfaces but not yet very clear weather all 4 should be elevons. CG position and respective wing pitch have to be determined.
I’ve caught up on some of the previous thread that led to the creation of this one and I find your build (s) and flights for the copter tailsitters very impressive! I have a lot more catching up and learning about VTOL in general (my first contact with VTOL was yesterday flying a Parrot Swing I just bought on Amazon…so a long way to go…) before being able to contribute anything – I expect – but I’m very interested in this topic and this design in particular!
I tested also Q_frame_type=0 and it works again perfect. Q_tailsit_motmx was set to 15 and I cant see any difference in FW flight nor with transitions. I pushed manually the wing to yaw it while hovering and I can hear the Differential torque working. Great…
I begun the construction of my tandem wing, already 2 foam core cut.
Great! Thanks for testing both the PID updates and differential torque.
Does differential torque provide much additional yaw authority in hover?
You may want to retune your feedforward gains with the PID updates and try playing with the new filter parameters. There are now 3 filters per axis, target, error and derivative:
http://ardupilot.org/plane/docs/parameters.html#q-a-rat-rll-fltt-roll-axis-rate-controller-target-frequency-in-hz
I haven’t seen any documentation or discussion on setting the new parameters, but here is what I had in my last Stryker_quad SITL run:
Q_A_RAT_PIT_FF 0.100000
Q_A_RAT_PIT_FLTD 10.000000
Q_A_RAT_PIT_FLTE 0.000000
Q_A_RAT_PIT_FLTT 20.000000
Q_A_RAT_RLL_FF 0.000000
Q_A_RAT_RLL_FLTD 10.000000
Q_A_RAT_RLL_FLTE 0.000000
Q_A_RAT_RLL_FLTT 20.000000
Q_A_RAT_YAW_FF 0.200000
Q_A_RAT_YAW_FLTD 10.000000
Q_A_RAT_YAW_FLTE 1.000000
Q_A_RAT_YAW_FLTT 20.000000
One flight this morning with above parameters. Yaw is stable even at the max descend rate which is 250cm/s and that’s already impressive. But there were almost no wind this morning and the comparison with previous flight is not easy. I will play with FLT parameters next coming days to make my mind.
When I manually push the hovering wing CW or CCW, yaw authority is less when the perturbation is CW (view from above), this is because there are no control surfaces behind top and bottom motors. I expect the quad X configuration to have better yaw authority.
Hi everyone,
I have read +1800 post in Dual-motor tailsitter topic and then I came this topic. Your works are so great that’s why I’ m very excited about it. I just made a quad + tailsitter. I’ m curious about When will the codes for copter-tailsitter release for Beta version?
This is my ugly baby 

@mono Thanks for posting, that looks like an interesting airframe.
Copter tailsitter support is already in master, only the PR to add the gain scaling options has yet to be merged. The gain scaling isn’t necessary for slow flight in VTOL modes though, so you should be fine using master until you want to try going fast.
I’ll post here when that PR is merged, in the meantime you can use the custom binaries here:
pr-feature-tailsitter-gainscaling
if you’d like to help with flight testing.
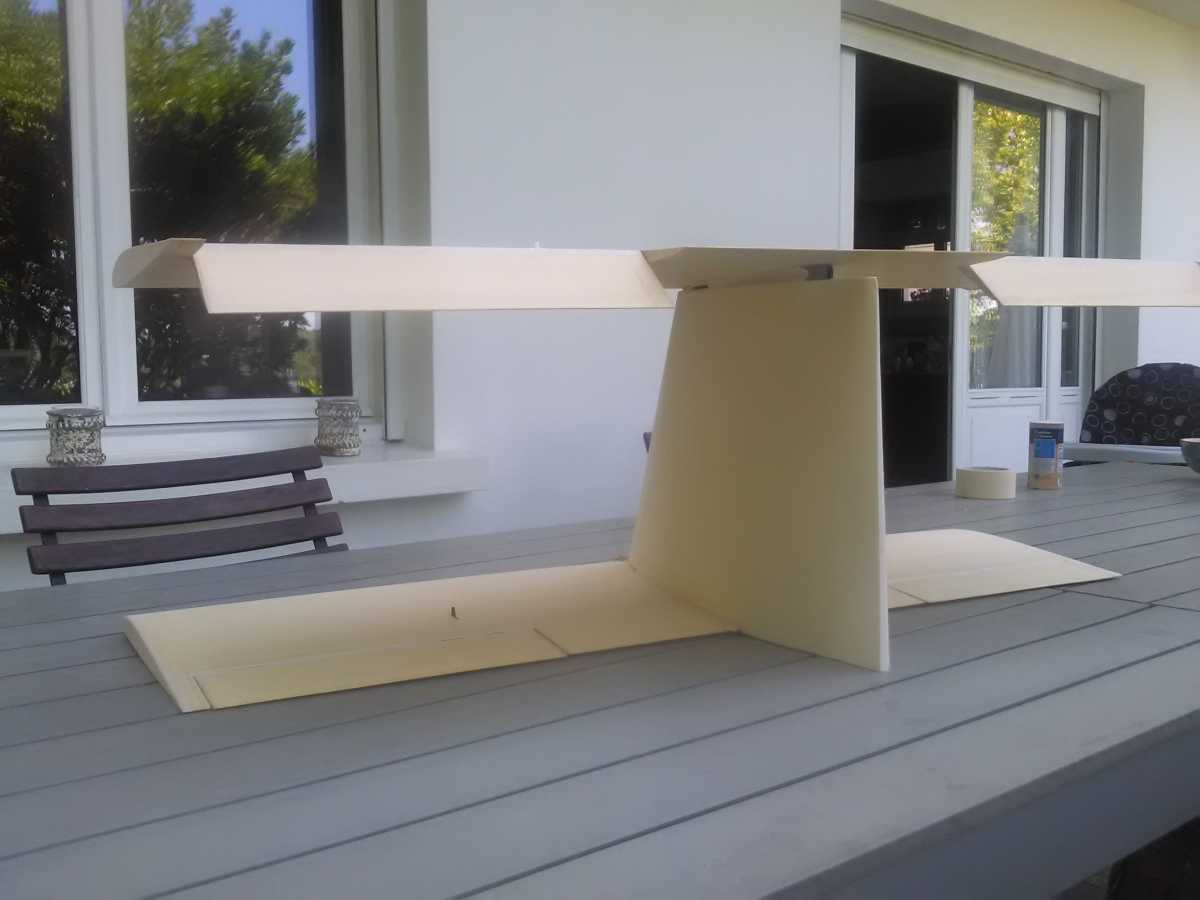
2 photos of my copter X tailsitter in progress. I changed a little my mind in order to get something more compact. Vertical distance between wing = wing cord. Longitudinal distance = 1/2 wing cord.
Are those figures somewhat arbitrary or based on aerodynamics/fluid dynamics theory/empirical? For the relative placement of the two wings and the sizing of the wings themselves.
Also, is the extension of the fuselage past the back of the bottom wing simply for static tail-sitting while on the ground or is that going to be a fifth control surface ?
the fuselage is a 17% thick symmetric airfoil. Its leading edge is 4 cm behind wings leading edges. This position together with the outline give a position of the 25% fuselage mean cord well behind the aircraft CG (around 7cm). I hope it will be enough to ensure aerodynamic yaw stability. the aircraft will also sit on the trailing edge of the fuselage. I do not plan to add a control surface for yaw (plane frame), this can be done very well with differential thrust either in copter or plane mode.
Nothing very clever behind. I believe It would be much better for stability and performance to position wings as far as possible to each other but I wanted to make something compact as my workshop is already full of plane. I think also the wind resistance will be better like that.
Makes sense!
From visual comparison, the Opener BlackFly does have a much greater distance between the wings, which makes sense given your stability argument and the intended human application.
That may be a question for @kd0aij but do you know if the firmware would support two motors rather than one (per half wing) ? For redundancy and prevent vehicle failure if any one motor fails.
I looked at some picture of the blackfly and It seems to me that motors on a same wing spin the same direction. Converted to ardupilot it could be two quad motor layout, a small inside an a larger outside rather than an octo. Nevertheless there would be a big flaw with all plane modes as plane control rely only on control surfaces. I mean there is no feed back from attitude error to differential thrust so a motor failure would be catastrophic.
Looking at one of their videos, it seems that the front port inboard (vehicle left) motor rotates CW and the starboard inboard motor rotates CCW (looking from the front). It looks like the rear inboard motors rotate opposite to the corresponding front motors. That looks like a good configuration to me, assuming the outboard motors rotate the same direction as the inboard motors on each wing.
I’ll try configuring a RealFlight model that way and add a copter tailsitter frame to simulate it.
FYI: http://news.bellflight.com/en-US/181700-bell-autonomous-pod-transport-70-achieves-first-autonomous-flight
(with a little glimpse of Missionplanner 15sec into the video https://youtu.be/bjYVOcS0qd8)