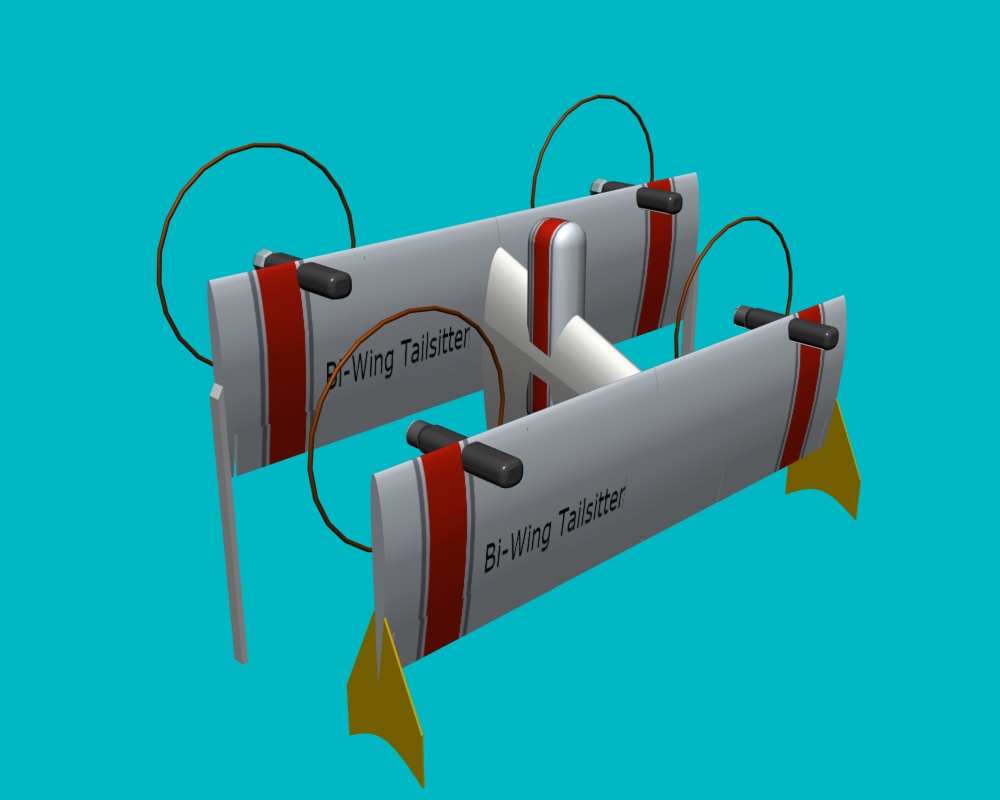
I have rebuilt the Model. Now with moving parts. But the lower mots I had to replace by simple cylinders. Else it would not work. e.g. when I copy one of the top motors, rename and replace it to the lower mot.carrier RF8 crashes as usual wiht “unexpected error”. Absolutly no error handling.
The servo channels have to be modified according the needs of SITL. https://drive.google.com/open?id=1LcL6ecmT6sLR2hnDKXK3gH2mfjNG5pKQ
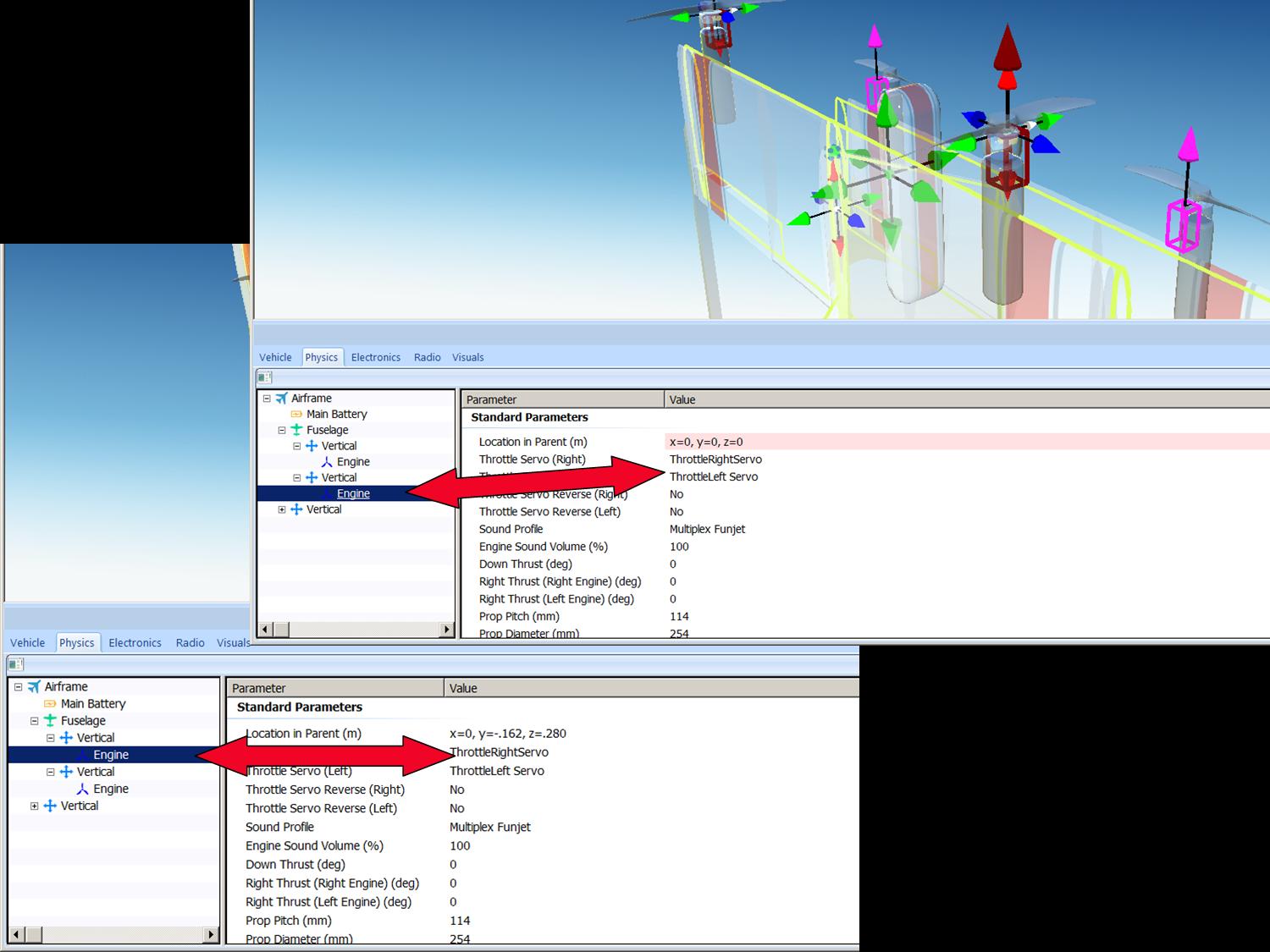
And below how crazy the Mot.Carrier has to be designed in order to be correct in RF8.
These can not be upright even not when rotating the part-axis.
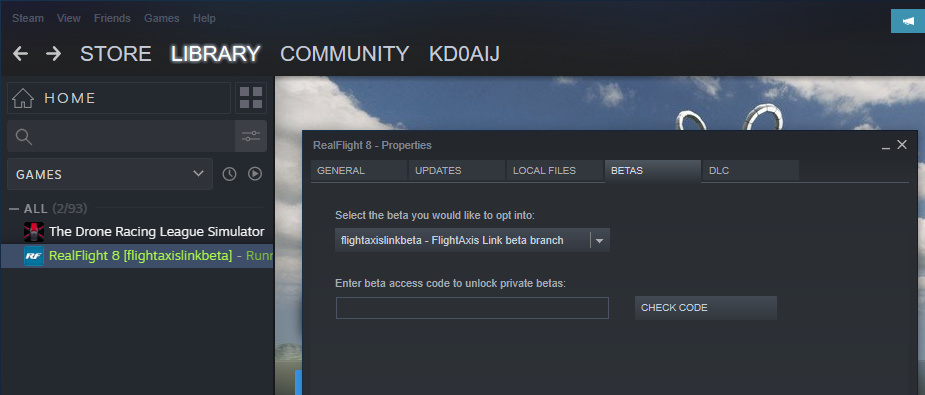
I tried to use SITLin order to test my “Product”.
But as described in the Dev.Wicki for RF9 it does not work for RF8.
At this place it’s nothing like FlightAxis to select.
*
On RealFlight 9 go to Settings->Physics and enable the FlightAxis option then restart RealFlight.
This is the command I use to start SITL with FlightAxis:
…/…/Tools/autotest/sim_vehicle.py -D -G -j4 -f flightaxis:192.168.0.100
The URL is for the computer which is running RF8.
BTW, I’m having better luck with your latest bi-wing model. It’s flying well in manual and FBWA, but I’m having trouble with VTOL modes. Looks like it’s just a tuning issue, but I did have to swap the motors from left to right. Also, when the right visual propeller spins it’s actually the left motor that is spinning.
Thanks for testing. It looks like the Pitch P is wrong. Can you get also a Log?
So you don’t need to “prepare” RF8, just running?
It looks like something with python. No experience about but on my Computer.
I will have a look at the left right definitions, again. When editing and modifying left/right things like the wings some other part-definitions change also. When correcting this, another part has again changed.
This editor is somthing I can recommend for masochists.
It seems control surfaces deflect only a little and with a lot of delay. But I made several flights with control surfaces disabled and the biwing was stable.
It seems that there is a problem with the motor rotation directions; the reaction to differential torque seems to be in the opposite direction that I expect when I disable the control surfaces.
But I am able to get it to hover now with and without control surfaces with parameters similar to the real ones. Without control surfaces, it just goes unstable when I try to yaw, so there is definitely something backwards with respect to torque.
I’ll push the two versions up to the SITL repo for you to look at. I did increase the total mass up to 2.2kg to increase moments of inertia and boosted motor power to 400%
Hover thrust is only 27%, so I should probably reduce the power to 200%
without control surfaces the yaw control of the real model is weak and I got large error, when I made the test I thought also it was not working but it was OK.
I checked the model parameter list and found servo 1 and 2 are disabled.
Thanks for pointing that out. I didn’t have any luck getting flaperons working on the lower wing, but it’s flying pretty well with elevons enabled on both wings now. I updated BiWing9_swapLR JWL-065_AV.RFX and the params in the repo.
Thanks for the video, I’m happy that it flies.
I can’t test it because I have no luck to run SITL with RF8 on a single PC.
Just for this I don’t like to install other SW as requested in the Wiki to use it on a network.
running sitl on a Windows machine using cygwin or WSL
SITL connect but to something else and I can see an airfield in the desert.
I’ve postet it to the Forum Simulator.
Yes, I defined the rotation direction according @losawing as usual view from front. But in RF8 they see it from back and I didn’t realize that.
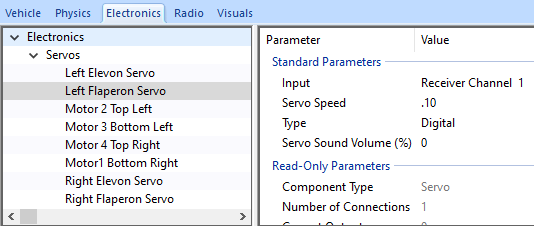
Have you assigned the servo also to the lower flapperon as in the pic below.
(Here not the correct servo nrs. yet) In my RF8 upper and lower works simultanyously
Nice to hear. This is called “Reverse engineering” at first the real model and then the Simulation
May be, for your next Project I’m faster.
It would be intersting to compare the Params Real to SITL in order to know if later the SITL Params could help at the beginnig for a real Model.
At one point, I had the flaperon servos assigned to RX channels 3 and 4 instead of 1,2 but the effect is the same as mapping servos 1,3 and 2,4 to left/right elevons as above.
I now run both SITL and RF8 on my Win10 laptop, with SITL running in WSL, and that works well. It’s a quad-core i7 with Nvidia GTX1050 graphics.
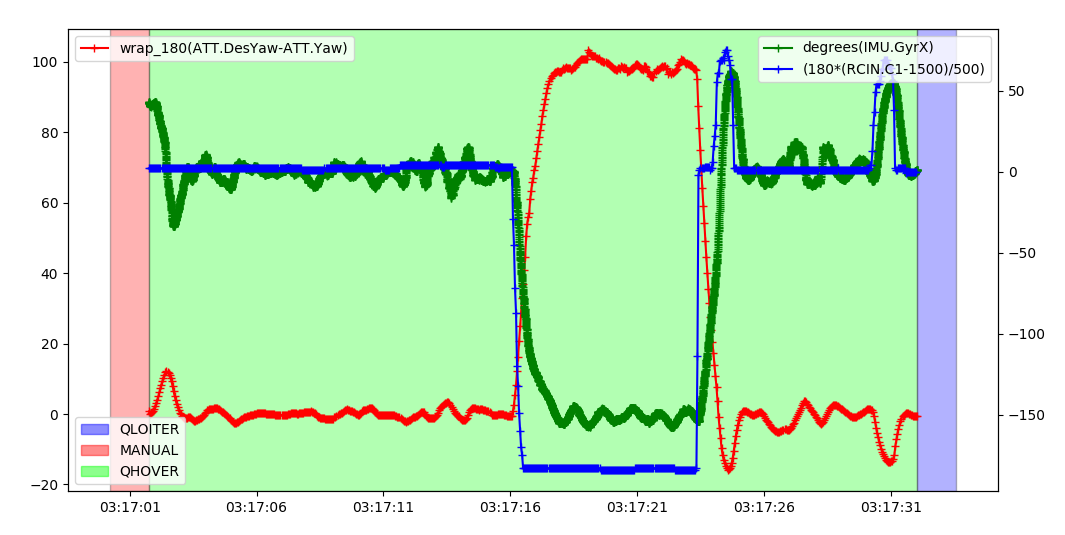
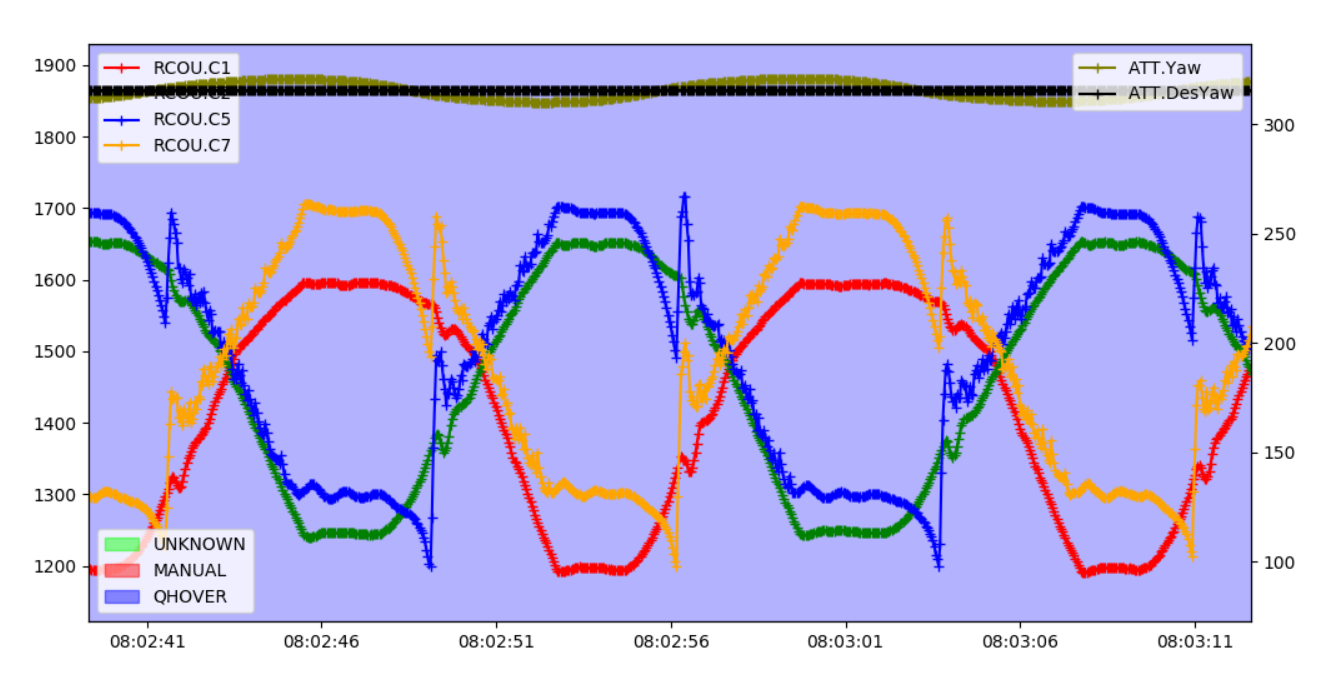
There’s definitely something wrong with the motor torque. It looks like the torque control is fighting the ailerons. This is left/right elevon and motors 1/3 while hovering:
After the reverse engineering, the benchmark…
nice model but 3D printing is a little bit heavy, 50% more weight with same battery.The autopilot is KK2 board. I do not see any transition, the flight looks like q_stabilise mode.
@losawing I guess the BlackFly design’s large fuselage has the advantage of serving as landing gear and, of course a streamlined enclosure for a big payload. Plus it’s amphibious…