I am experiencing the following with my AUAV-X2 and 3.4.4
This is a new build and I am trying to figure out parameters.
Last 2 flights, when I switch to Althold, the copter sinks until I switch back to Stabilize and take over.
The Copter hovers at about 30% (only one Lipo aboard and no camera during setup flights)
MOT_THST_HOVER Parameter has been set at .5
MOT_HOVER_LEARN set to “2” -> learn and save
So any idea what to look for?
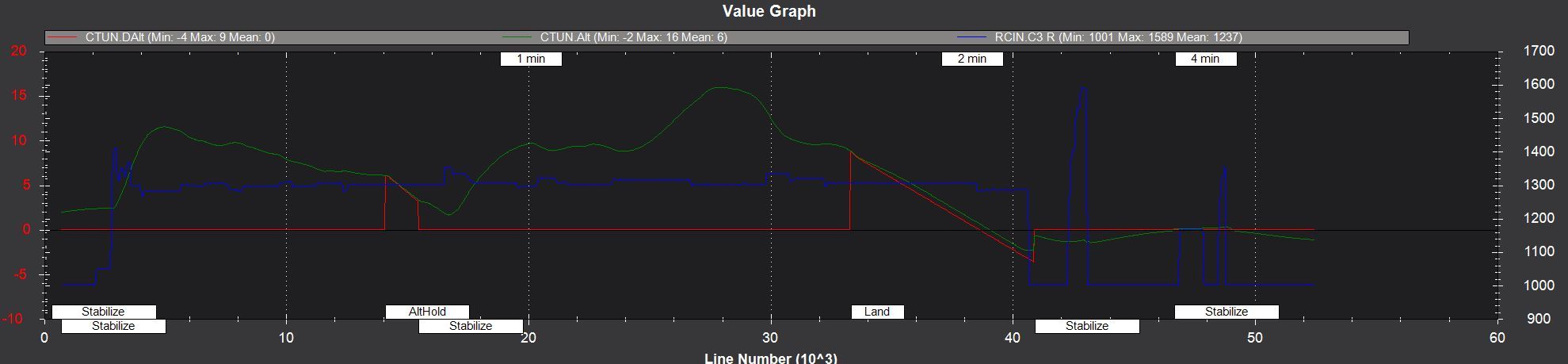
I have attached a short log, but it shows the situation.at around 30 sec. I have a long log, but I can repeat the behaviour and just attach the short one. At the end there is a flip, for which I open a new thread.
It reduces altitude because your throttle stick position tells it to. In that flight, you’d have to move the stick to center after the mode switch to alt hold. Or, set the hover thrust to 0.31 and fly again. That will line things up so stab and alt hold use the same stick center to hover.
But what is then MOT_HOVER_LEARN supposed to do for me?
My understanding is that this function should exactly do that, so I don’t have to set the MOT_THST_HOVER by myself.
If I have to set MOT_THST_HOVER myself, it should be available as an in flight tuning parameter on the channel 6 knob.
And that would also mean, that if I fly with a smaller/bigger LIPO or with/wothout camera, Althold wold not work either, because MOT_THST_HOVER is only good for one specifc setup.
Dom, leave it set to 2. It will learn. In the posted flight, you never actually hovered. There are several checks to pass before it learns the average. It has to be in an altitude holding mode (alt hold, or loiter for example), and it has to NOT be changing altitude. Roughly 15 seconds of hover will get it close when configuration(payload), or conditions change.
I got it now. Did not know that I was supposed to change throttle while IN Althold mode
After I adjusted Althold manually, the MOT_THST_HOVER was changing, about 20-30 secondes got it in the right ball park. After a minute, it adjusted a bit more and stayed stable after that.
So is there a deadzone around the stick in Althold and Loiter that I have to go over to change position?
If the throttle stick is in the middle (40% ~ 60%) the vehicle will maintain the current altitude. Outside of the mid-throttle deadzone (i.e. below 40% or above 60%) the vehicle will descend or climb depending upon the deflection of the stick.
The size of the deadband can be adjusted with the THR_DZ parameter (AC3.2 and higher only). This params value should be between “0” and “100” with “0” meaning no deadband. “100” would produce a deadband 10% above and below mid throttle (i.e. deadband extends from 40% to 60% throttle stick position).
So MOT_HOVER_LEARN is always left at “2”? Or do you use it when you know your config is going to change? And I understand that this can also be done in Pos Hold as well?
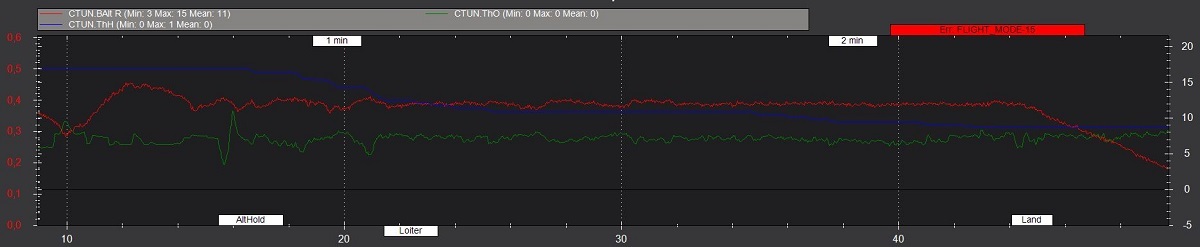
You can leave it at 2. But, it will not learn a value below 0.125 so if you have a high thrust/weight craft with a value below this set it based on Ctun>Tho in the flight log at a Hover and then disable learning.
I prefer to leave it set to 2 on everything that hovers above 12% throttle. It’s quick to respond and adapts to variations in weight or battery performance.