There’s some serious noise and oscillations going on there.
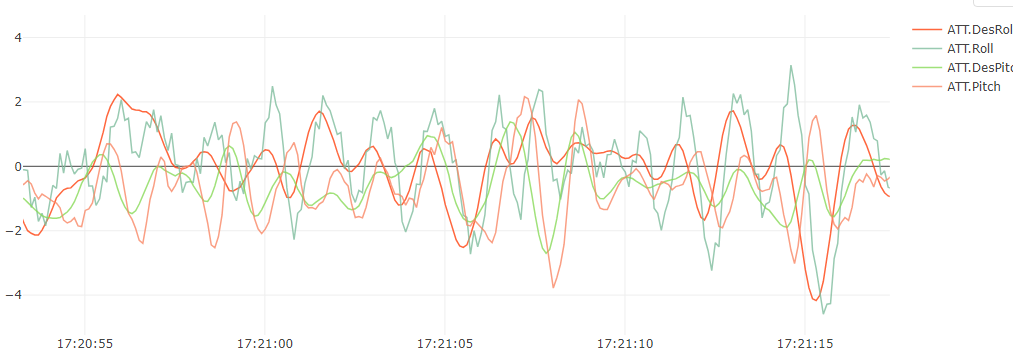
And motor outputs are correspondingly “noisy” too.
My personal preference would be take the PID tuning off the TUNE ch6 unless you’re an experienced tuner - it generally causes more confusion than good.
I’d set these and do a test flight with some hovering and gentle manoeuvres.
ATC_INPUT_TC,0.2
ATC_RAT_RLL_P,0.11
ATC_RAT_RLL_I,0.11
ATC_RAT_RLL_D,0.003
ATC_RAT_PIT_P,0.11
ATC_RAT_PIT_I,0.11
ATC_RAT_PIT_D,0.003
MOT_THST_EXPO,0.77
MOT_SPIN_ARM,0.15
MOT_SPIN_ARM,0.10
MOT_BAT_VOLT_MAX,49.5
MOT_BAT_VOLT_MIN,33.6
PSC_ACCZ_I,0.6
PSC_ACCZ_P,0.3
BATT_ARM_VOLT,44.3
BATT_CRT_VOLT,36
BATT_LOW_VOLT,37.2
BATT_FS_LOW_ACT,2
BATT_FS_CRT_ACT,1
The ones to check are:
ATC_INPUT_TC - adjust higher for softer RC control, even try 0.22
MOT_SPIN_ARM - check with MP motor test for minimum reliable startup
MOT_SPIN_MIN - just starting to produce thrust, usually approx _ARM +0.05
MOT_THST_EXPO - I suspect those ESC’s are slightly more linear than most, you might be able to go lower with this param. Here’s what to look for once the rest of the tuning is done:
You can copy/paste that whole list of params into a text editor and save as a {some_name}.param file then load it via MissionPlanner (compare) to avoid all the typing errors and ages trying to find them all.
Please let us know the outcome of the next test and post another .bin log