Hi Team,
Im using Pixhawk loaded with Missionplanner. I normally arm the copter in stabilize mode and change to Altitude hold mode before lifting. Once lifted then change to Loiter mode for movement.
I did check the GPS signal was strong while arming. When I liftd the copter in Altitude mode and changed to Loiter mode it behaved weird. Also hear the beep sound and copter moved unexpecgedly. Then cut the throttle fully to bring it down.
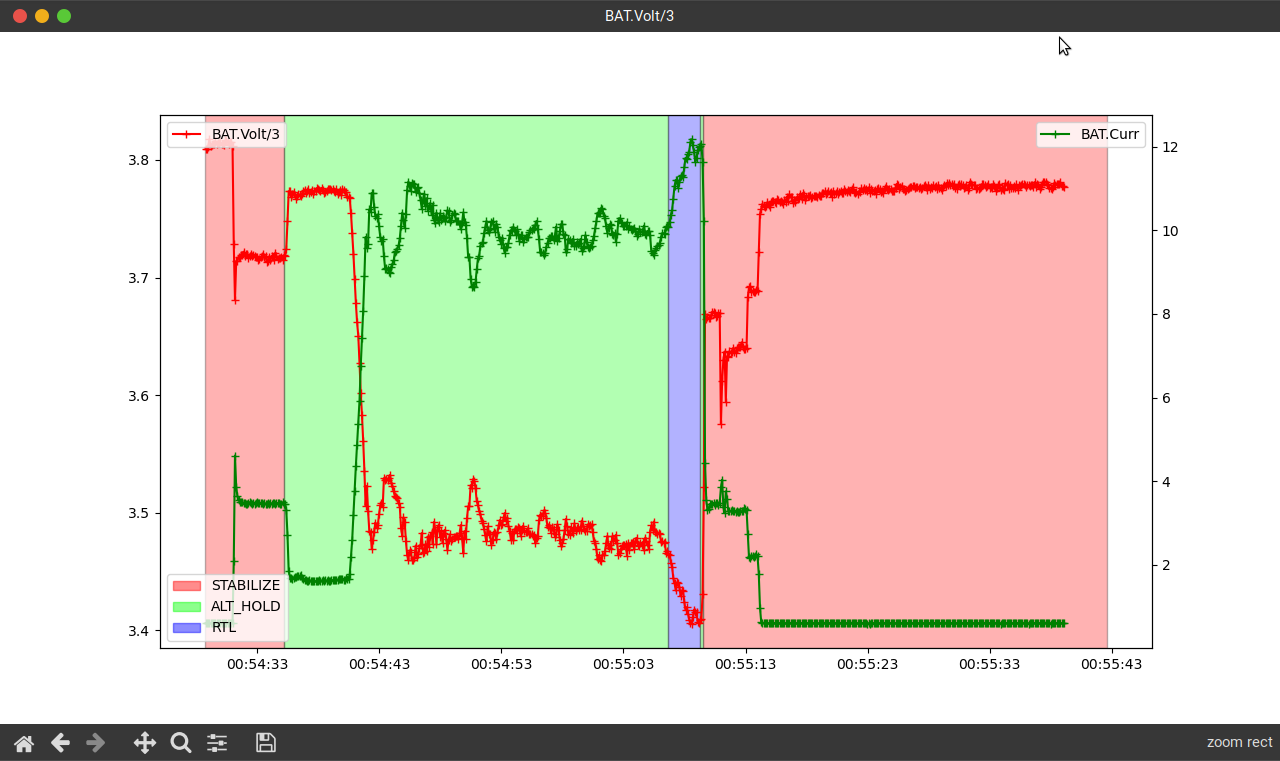
While checked the log it shown as battery warning. But the battery was full charged the voltage was 11.7. What could be the problem here. I attach the log file for reference. Please help
2022-08-13 12-24-28.bin (933.4 KB)

Based on the numbers you are saying I am guessing you have a 3S lipo. A fully charged 3S battery should be 12.6V or 4.3V/Cell. This battery dropped to 3.4V/Cell or 10.2V. That is too low.
The quad appears to be flying on default parameters. Complete the initial parameter setup to help set up tuning values and some of the battery warning levels. Then go on to setting up filters and flight tuning.
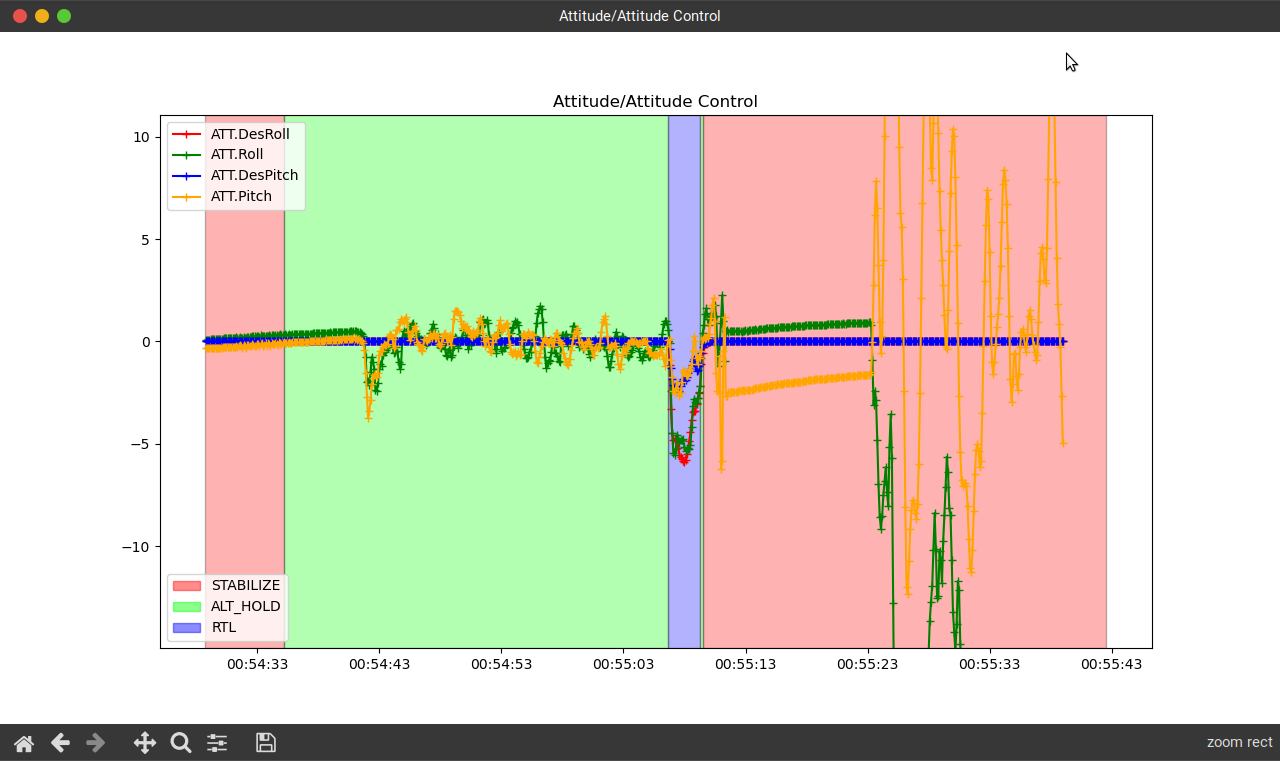
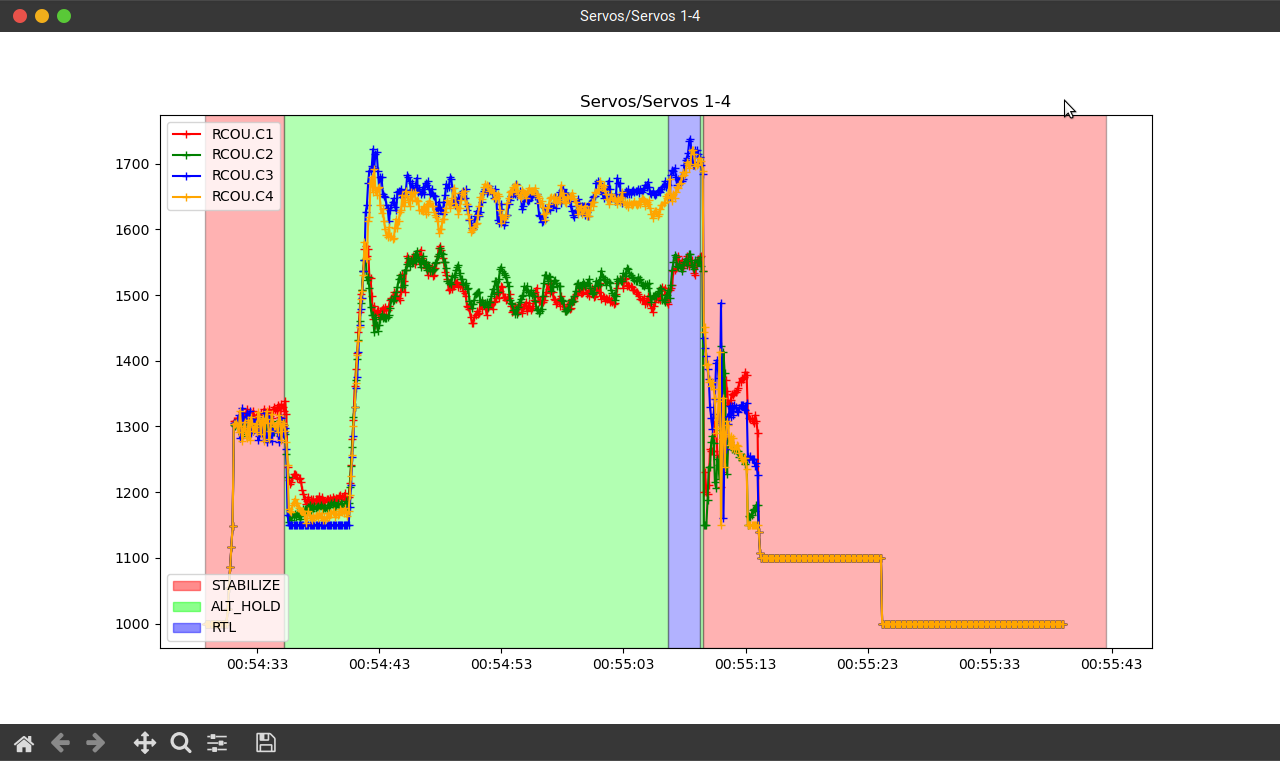
You also have a torque differential between the CW and CCW motors. Have a look to see if the frame is straight and all the motors are even.
Hi Alister,
Thanks for the quick reply.
Im using 3S lipo battery. After landing I have checked the battery level it was 11.7. Dose it mean even if one the battery voltage drops less than threshold it will warn, Isn’t it ? What can I do here to maintain the battery level same for all three ?
Yes I have used the default parameters. I wil have to modify and tune it as required.
Reg the toruqe level of Motors. The frame is staight and motors are also even. Any other reasons which would cause different torque level ? It seems when the Quad is in ground (Take off and land) the torque seems to be same but only while in Air there is a difference. Let me know your view please
The battery voltage while under load is significantly lower that with no load.
You post flight measurement of 11,7V is therefore useless. While flying the real voltage dropped like @Allister said.
Read more on how batteries work before operating your drone.
2 Likes
My advice would be not to use loiter until you have tuned and fixed all other issues. Loiter normal requires the drone to already fly solid in alt.hold or stabilize.
But first do all that @Allister told you. A yaw biased drone will never fly well. He among others helped me to tune and get my quad up as well. It also had a way bias, which resulted in more than just bad yaw behavior.
Hi Axel1, Thanks for the answer, Will fix up the issue in Stablize/Altitue and try it in Loiter. Im new to this and making my first copter here.
Could you please tell me what do you mean by Yaw biased ? Could you please share some documentaiton / video tutorials to go through and study. My first fly was very wel in Altitude mode and not sure what changes made it to this behaviour. Im emntioning my configuration below, please advise what can be done to improve the performance
F450 Frame
8inch propeller (have anotehr set of 10inch propeller too which didnot fly in good stability)
3S battery
2212 1400KV motor
40A ESC
Thanks for your help
By the way is there any default paramers that can be used for better fly
Hi Amilcarlucas,
Thanks for the answer. Noted and understood now.