Hello friends!
Through repeated testing, I found that gps-for-yaw was not the cause of the jumping.
New :
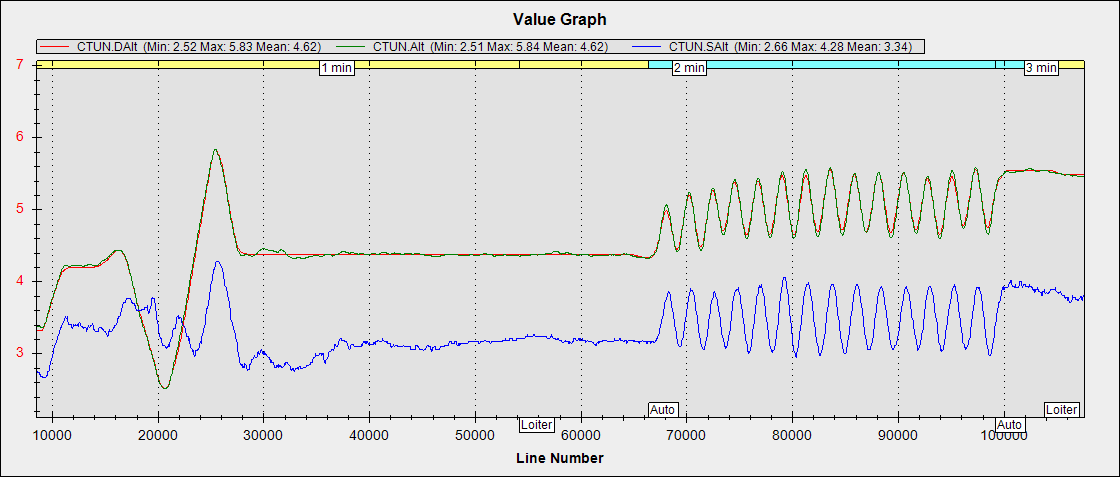
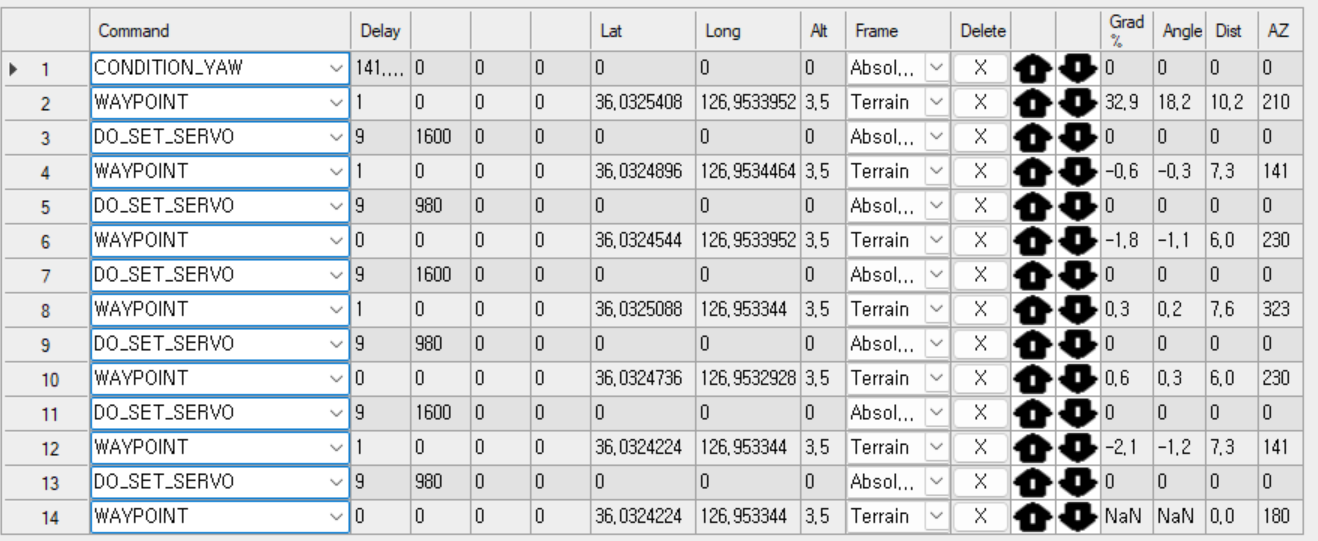
Copter Jumping during waypoint navigation in automode when using rangefinder altimeter (terrain following)
The result is the same as before, the copter jumps when navigating waypoints in automode.
I guess that in firmware 4.2.2 or higher, there is something wrong between the terrain following function and the navigation function.
New Logs here : Send Anywhere (include 5sec ad)
Thank you
OLD:
Copter Jumping during waypoint navigation in automode when using gps-for-yaw
I have a problem with jumping during waypoint navigation in automode when using Dual ublox zed F9P with gps-for-yaw set.
(but copter works fine in Althold and loiter mode… ).
I’ve tested with all the changes from AC4.2.2 to AC4.3.5RC1, all with the same result, and looking at the logs, it seems to be a jump to maintain the desired altitude, but I don’t know the cause.
The primary altimeter is a barometer, and the drone has a mmwave altimeter for terrain following. (With the current settings, it works fine if you don’t use gps-for-yaw and only use compass)
Thank you
old Full log here : Send Anywhere (include 5sec ad)