Problem is when I’m frlying in ACRO copter is losing oruentation on fast(agressive) turn (this is NOT PROP wash). I’ve increased ATC_THR_MIX_MAN = 3.5 - does not help!
I’m not sure about filters configuration. I do have 3.5" 4s quad in about 310g weight with battery.
It’s flying OK in Betaflight. I’ve lost in about 3 weeks trying to find the problem. And now I’m thinking to go back to BF
Hi man!
I was looking your series about chimera (thanks for that!) - I have it too
I was not looking on this specific series of your videos. But was trying to do in same way as you did with chimera.
Problem for me I did not get how to define right filtering. So I do have (in my opinion) good chart - but I’m not sure.
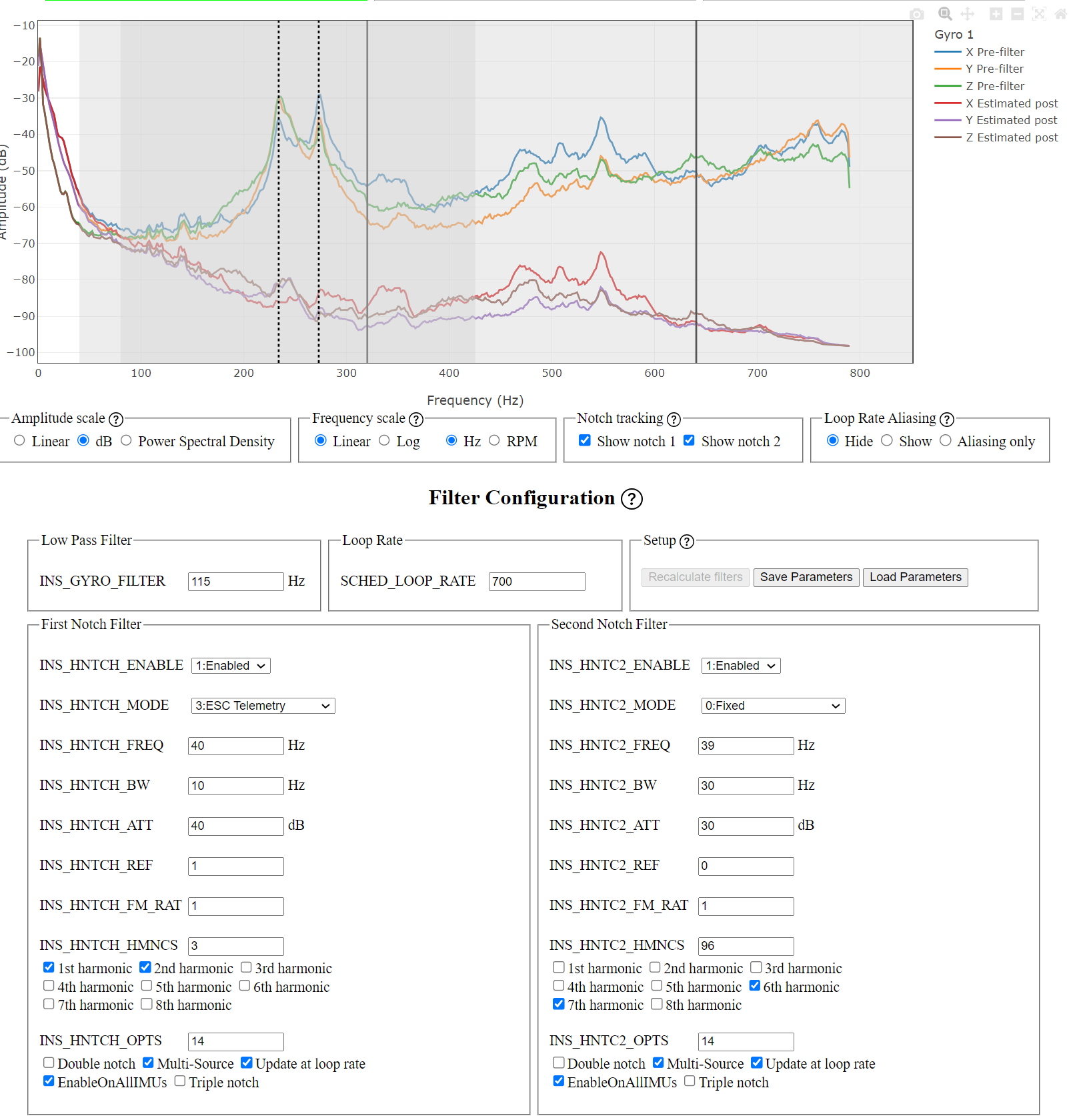
The noise looks ok. I think you could go narrower on the notch and the reduced phase lag will let you get a tighter tune. Given that you are using ESC telemetry you should be able to use FREQ 40/BW 10 and it all work as intended.
Your problem simply sounds like tuning. Fast aggressive turns generate a lot of noise which can affect the attitude controller. The control doesn’t look bad. Try the narrower notch and retune. What AGGR setting did you use when you did autotune?
Also you have Yaw D set but no FLTD for yaw which means you will get noise coming through yaw - set yaw FLTD to GYRO_FILTER/4 and retune
Most likely this is frame resonance since you are blasting about and your RPM is well away from this. This will prevent you increasing your filters any further so I would use the second harmonic notch to take this out. When you have done that you should be able to raise your filters so that you can get a tighter tune.
Multisource on the fixed HNTC2 is just strange.
And setting only the 6th and 7th harmonics at 6 * 39 = 234Hz and 7 * 39 = 273Hz respectively is also strange, but it does seam to work…
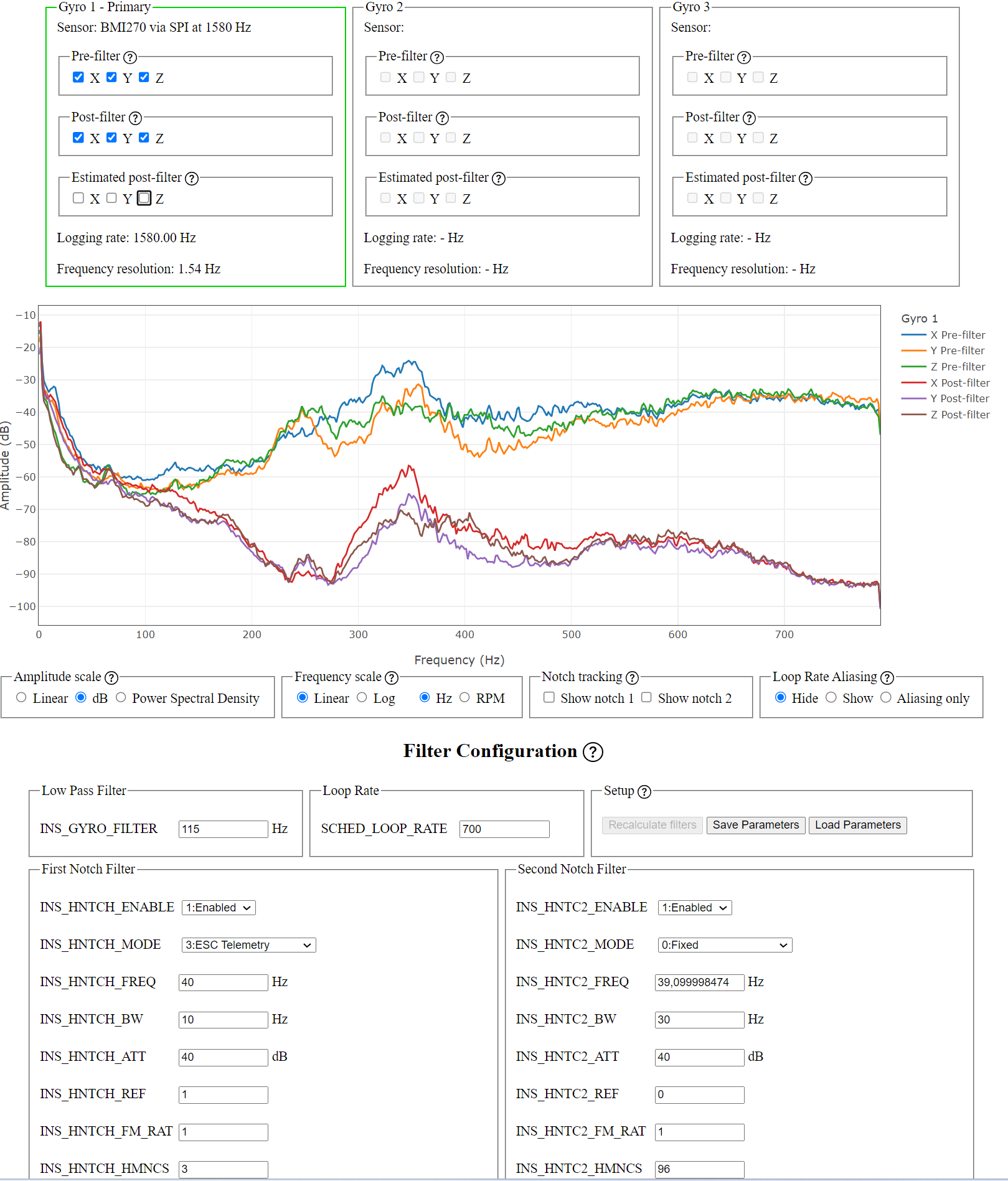
That motor is 12 Poles, you will need to set: SERVO_BLH_POLES,12
and I would try this filter configuration with a flight to see what the log is like then:
It is nearly the same as you had in the last log but just standardised/minimised.
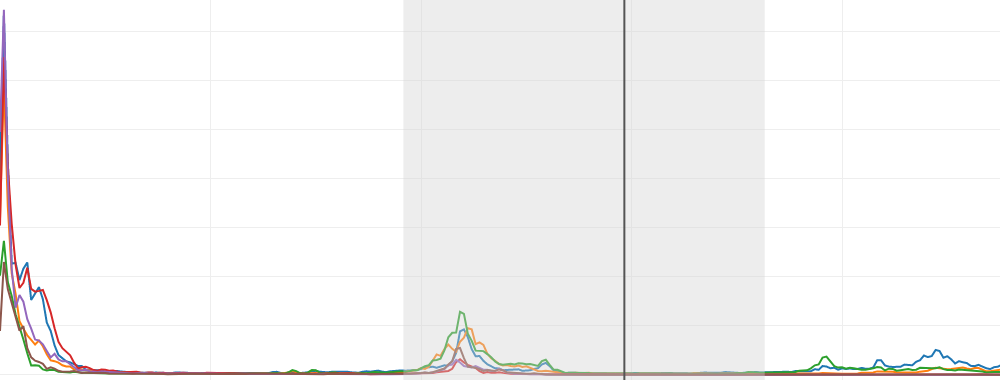
The number of poles explains why even in steady flight the notch was not matching the noise peak:
Thank. I was double checked nomber of pols - in some kind of reason I was missed N and P
Next few days I can’t test changes - because hawy rains here. I’ll let you know when I’ll get results.
So. Looks like problems was in number of poles. After setting correct value - it’s flying well!
I removed static filtering. Changed notch to 80/40. And no spikes after filter (even with 40/10)