I have 2 drones holybro s500 with pixhawk 6C both controlled using dronekit python
1- with ArduCopter Copter V4.3.7
This drone works fin, takeoff, and moves perfectly
Here you can see the full parameter list drone1.param (15.8 KB)
2- with ArduCopter V4.5.4
This one could not take off even with the same code and trying as possible to match the parameters with drone 1
What happened was that the drone was armed but could not take off at all
here you can see the parameter list and the .bin for this drone drone2.param (16.7 KB) drone2.bin.zip (684.3 KB)
Thank you for your answer.
I did that, nothing unusual in the messages upon arming.
The big problem in the try I listed before and all the tries after is the high Throttle which is not happening in the other drones that I tested. The power of motors is very strong more than usual.
I tried to go back to Copter V4.3.7 and I also rechecked ECS and all good.
Here I list again the new arming
Thank you for your help 2024-07-19 13-04-19.bin.zip (345.6 KB)
It’s switching the land mode by the GCS. I’m not sure why the command is coming, I can’t tell that from here, but it’s getting it from a GCS, not the RC based on the log data.
Hello
thank you again for checking my question
I need to clarify some points
1- I don’t use GCS I send commands using dronekit Python script
2- I don’t set arming checks =1 because that contains a check safety switch to be pressed to arm and I do not want to have this and be close to the drone and press the switch after launching the script since the drone is not stable
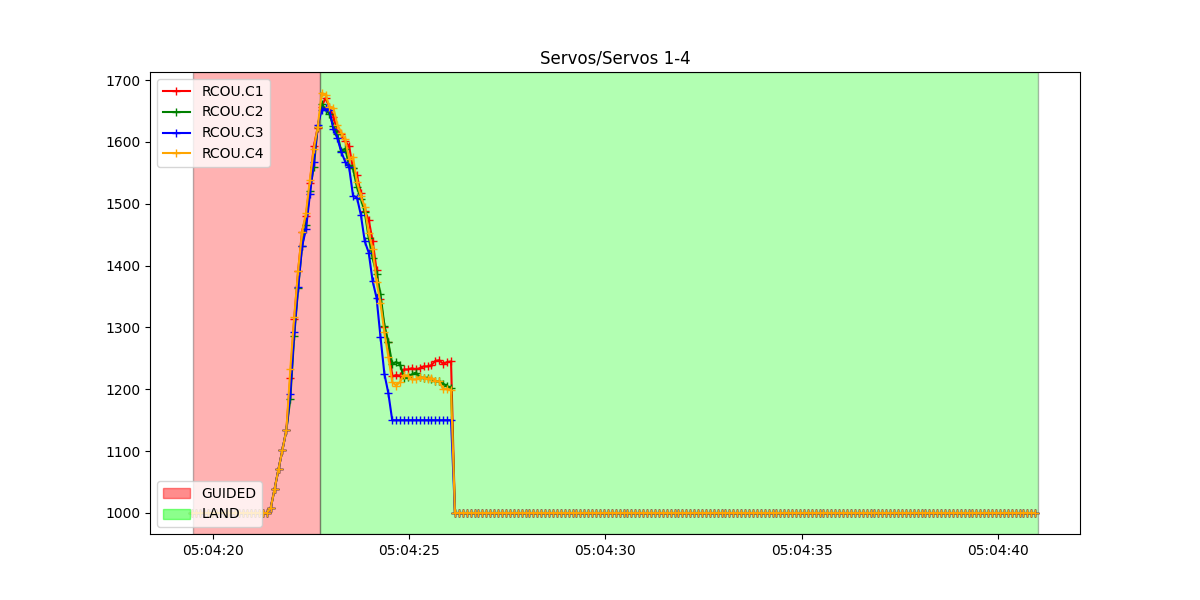
3- when you see Land I sent this command from the script since I see the throttle is not stable.
Note: that the same script was tested with other drones and it works perfectly.
You see 1700 for the motors and I think that is too high right? the other S500 that I tried it is less than 1500.
Here I updated the firmware and I tried again. I did not send Land I gave the drone time to take off even with the high speed of the motors.
After sending the command of takeoff the drone stays stationary until it flips and shows a crash message. 2024-07-21 20-47-12.bin.zip (551.5 KB)
I still do not know what the problem and that is happening in 2 drones I have after updating the framework and nothing wrong with the hardware.
The controller will see the GCS or a companion computer as the same thing.
That’s a mistake. Set arming checks to 1. Set BRD_SAFETYOPTION,0 to disable the safety switch.
Have you tuned this drone with an RC? It is often a mistake to believe that two drones can be just have copied parameters from one to the next. The motor outputs are going to max on this log. Over 1800, with motor 3 maxing out. This thig should have been half way to the moon. The battery voltage also dropped to damaging levels. Was this tied down or restricted some how?