Hello,
I am using Copter 4.0.3 and Pixhawk 2.4.8. I have flown 10+ times with same setup just having land detection issues. But this time, copter started falling from 30 meter altitude and I observed no reaction at all. I saw these messages,
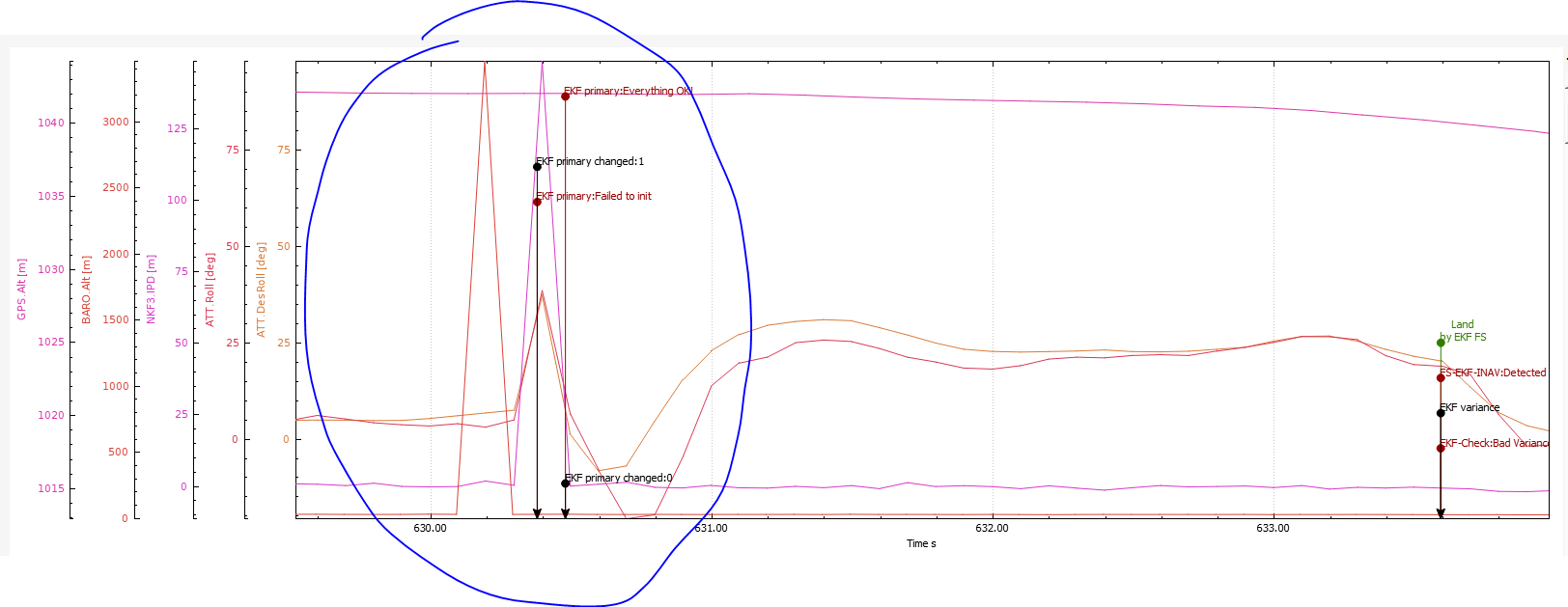
-EKF primary changed:1
-EKF primary changed:0
-EKF variance
-GPS Glitch
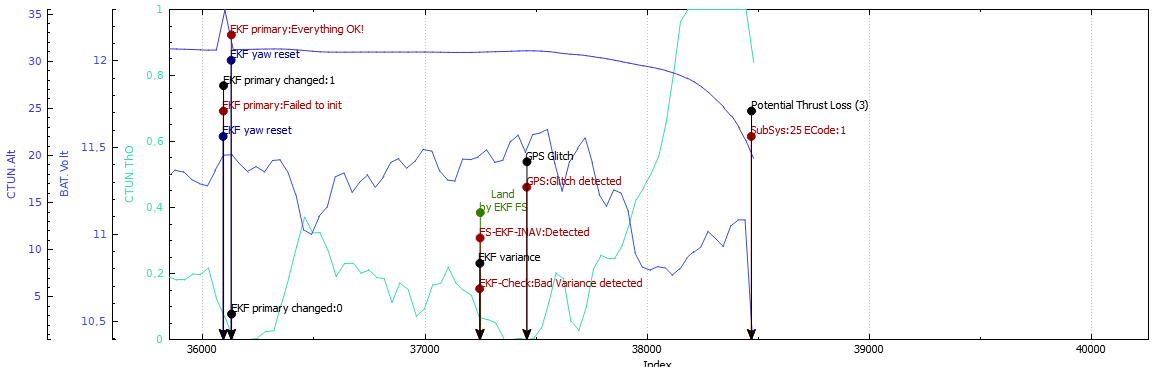
-Potential Thrust Loss (3)
I am having hard times to figure out what caused the suicide. I am attaching flashlogs if any of you curious to help out!
Thanks in advance.
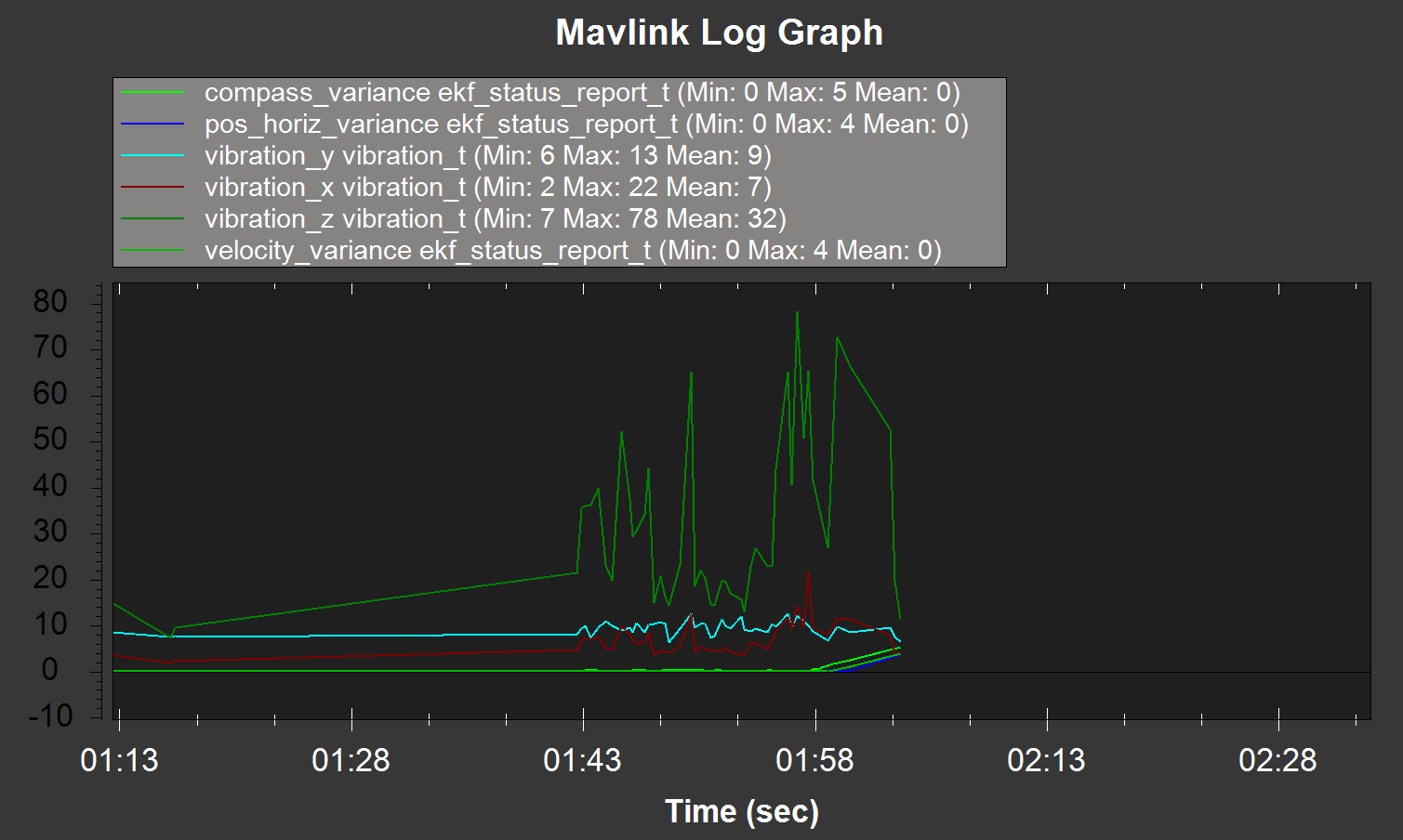
Indeed, after EKF failsafe copter tried to stay in the air, but event a full throttle to all motors, it kept sinking. And 10 sec before ekf failsafe the vibrations started in increasing causing clipping (saturation) on sensors. It could be a mechanical failure. (Motors were running because the battery voltage slag is consistent with the increased throttle)
I want to ask, is it the reason that copter could not recover from falling because its orientation was too bad even if throttle was maxed? And there was bad output coming from EKF originally resulting false attitude estimation. So that wrong motor outputs may be the reason to flip the copter? I guess I am coming back to vibration errors…
I gotta find the main problem in order to fix things, otherwise I will be doing shit and these things will come up again. I hope someone will give me the details that I am missing.
The potential thrust loss error logged almost at the same time when copter impacted the ground,(coincidence) this likely caused power disconnect and this is why the logging stopped. (check IMU, AccX, AccY and AccZ you can see the impact caused about 9G deceleration on the Z axis… )
There is a conflict I guess. Because logging stop when the vehicle was still on the air at 20m. There is no copter impacting the ground in the logs. Confusing colors, sorry for inconvenience.
Hi. It is definitely the level of z-vibration, leading to wrong altitude-estimation of EKF.
That is also the reason, why you get GPS-Glitch. I had this with several copters in the past too. The problem will be defintely solved in improved dumping of the FC.
Thank you for your reply. I am dumping the FC tho.
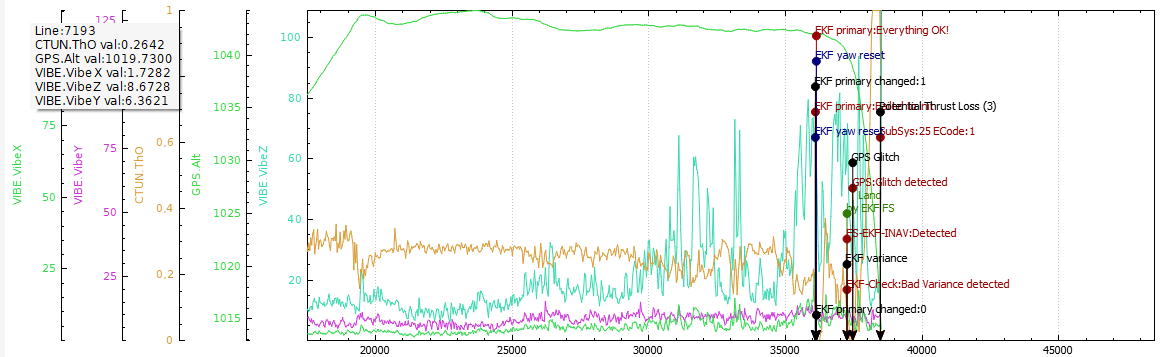
Here I can see Vib in 3 dims are fine during flight but suddenly Vib-Z starts increasing but I think it is not caused by windy conditions or anything affecting the copter that will end up giving more output to the motors. Because I don’t see any increase in CTUN.Tho. I guess there might be a mech failure causing that vib? And maybe that failure throw that Baro Glitch? Is it possible?
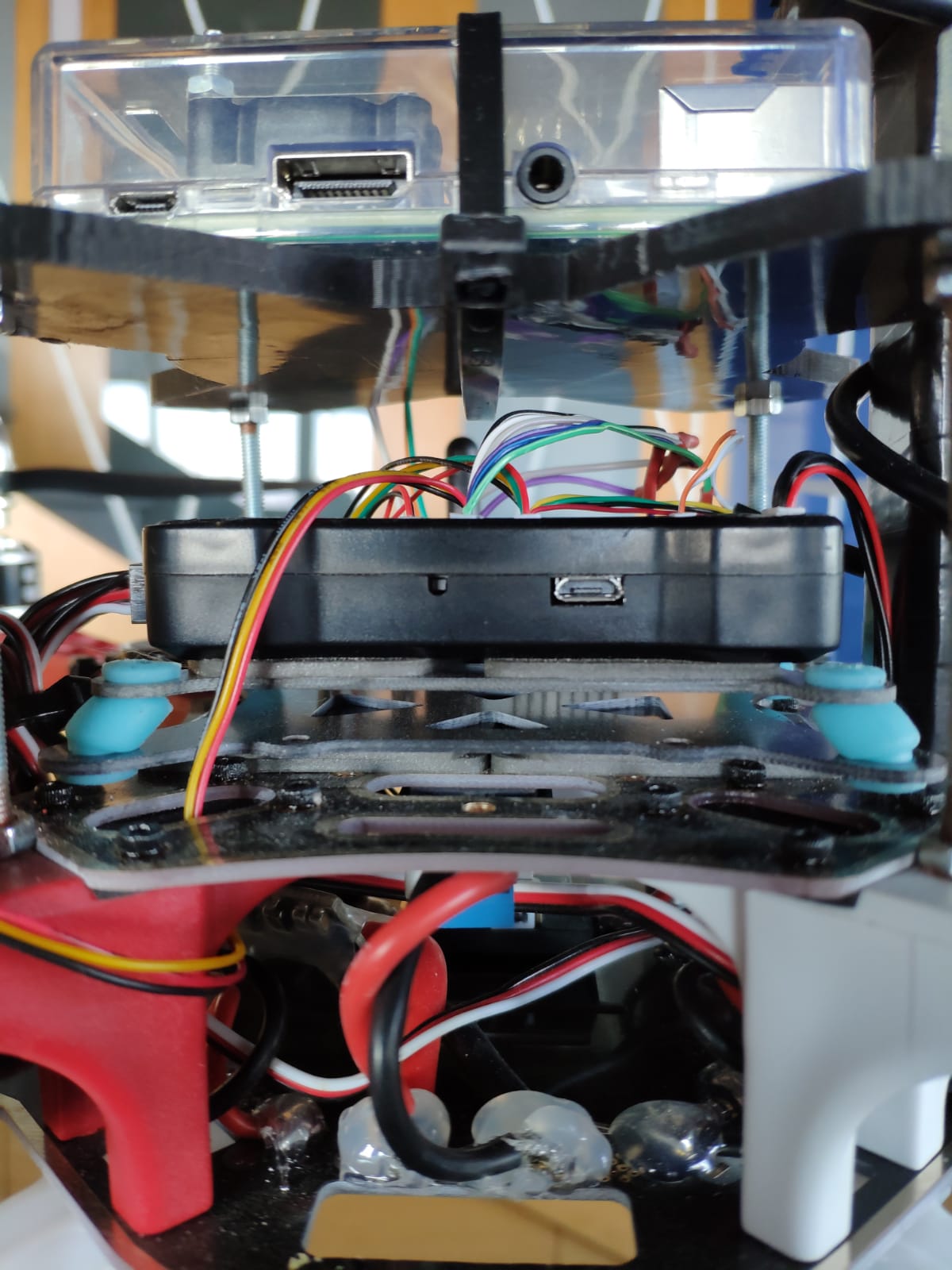
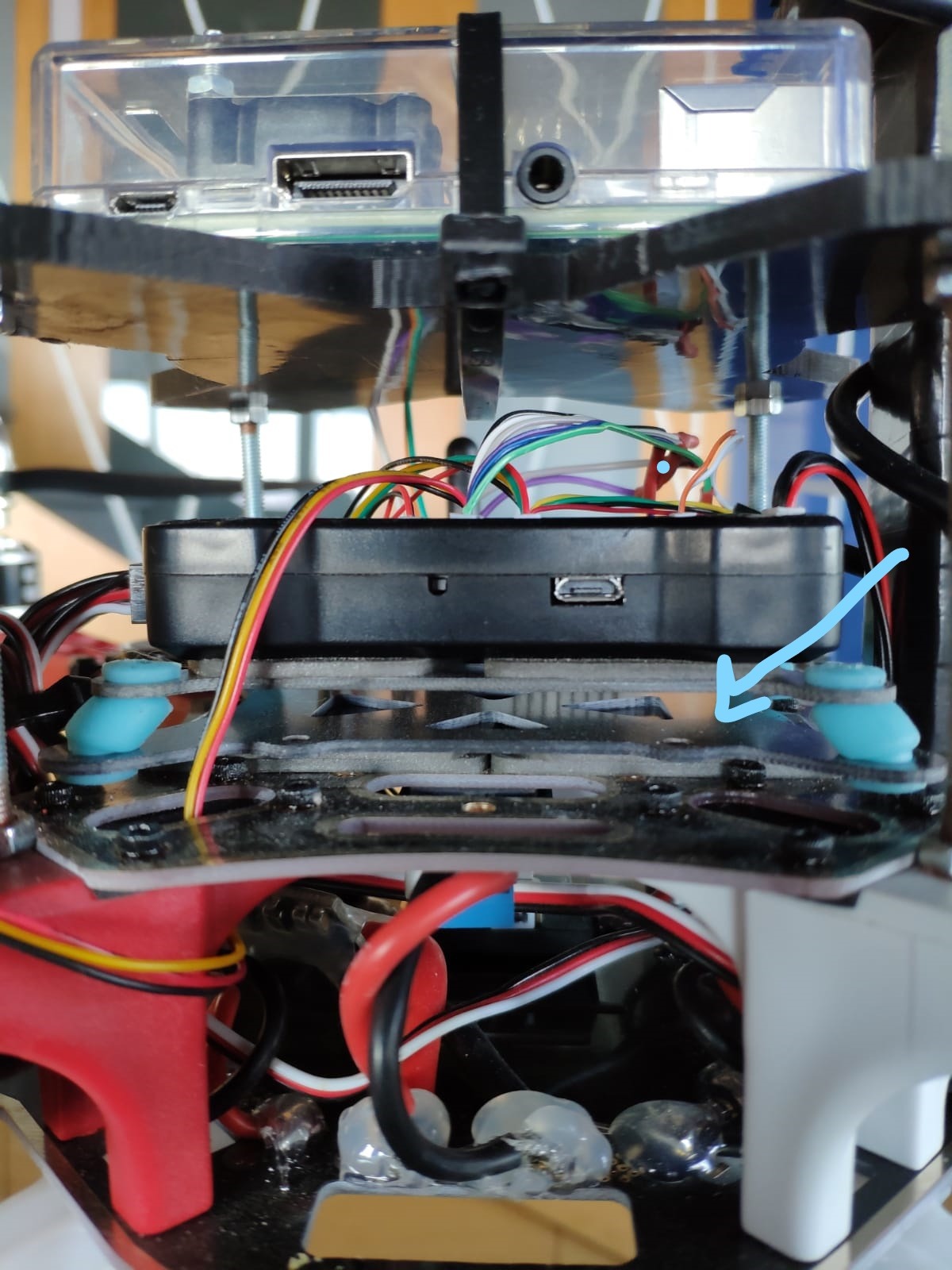
This my other setup, not the one that crashed. They are almost the same. I used tapes between surfaces of frame, isolation platform and pixhawk. Pi is located at top. Do you see any issue that would lead to vibration problems?
When I having issues with vibration and cannot tame them with prop balancing, I add 25-50g of lead below the flight controller, on the damped plate.
Plus, forget the hot glue, it get brittle in couple of months and fell off, plus as I see you covered only the solder part of the cable. The issue is that when you tin the cable, the thin goes up, under the insulation, and if you not fixing the flexible not tinned part of the cable, it will break where the tinning ends, under the insulation…