Hardware:
Omnibus F4 V3S (using omnibusF4 firmware, PCB layout seems the same) (no onboard mag)
External compass - QMC5883L
GPS - BN-280
LANRC 35A ESCs on DShot600
DJI 800KV (clones) with 1045 props
Molicel P42A 4S2P Li-ion pack
The newly built hexacopter had maybe 30-40 mins of flight time logged previously without any noticeable issues. I haven’t done a proper tune yet, only used initial values calculated by mission planner. Vibe, Compass health, and everything was okay in the logs. But I had never tested for interference on full throttle. The compass and GPS are about 3.5cm above the ESCs, and the FC is about 5cm above. The receiver was mounted right between the external compass and gps. The ESCs were all mounted near the central hub.
As I was waiting for a new radio to arrive, I modded my old Turnigy 9X stock receiver with speters/pwm2x using an arduino pro mini to convert PWM to SBUS. The receiver didn’t have any failsafe feature, but it had an LED that turned on when the transmitter was connected. So I probed into the LED to get a failsafe signal and modified the ppm2x code to set the failsafe bit in SBUS when the LED was off. I tested it on the ground by turning the transmitter on and off and it worked fine. In fact on the first flight in the log, you can see a complete SRTL triggered by a radio failsafe from far out in the field.
So, here’s how it went on the next flight:
I armed and flew my hexacopter from under a tall (60ft-ish) tree into an open field. GPS was good so I thought there wouldn’t be a problem.
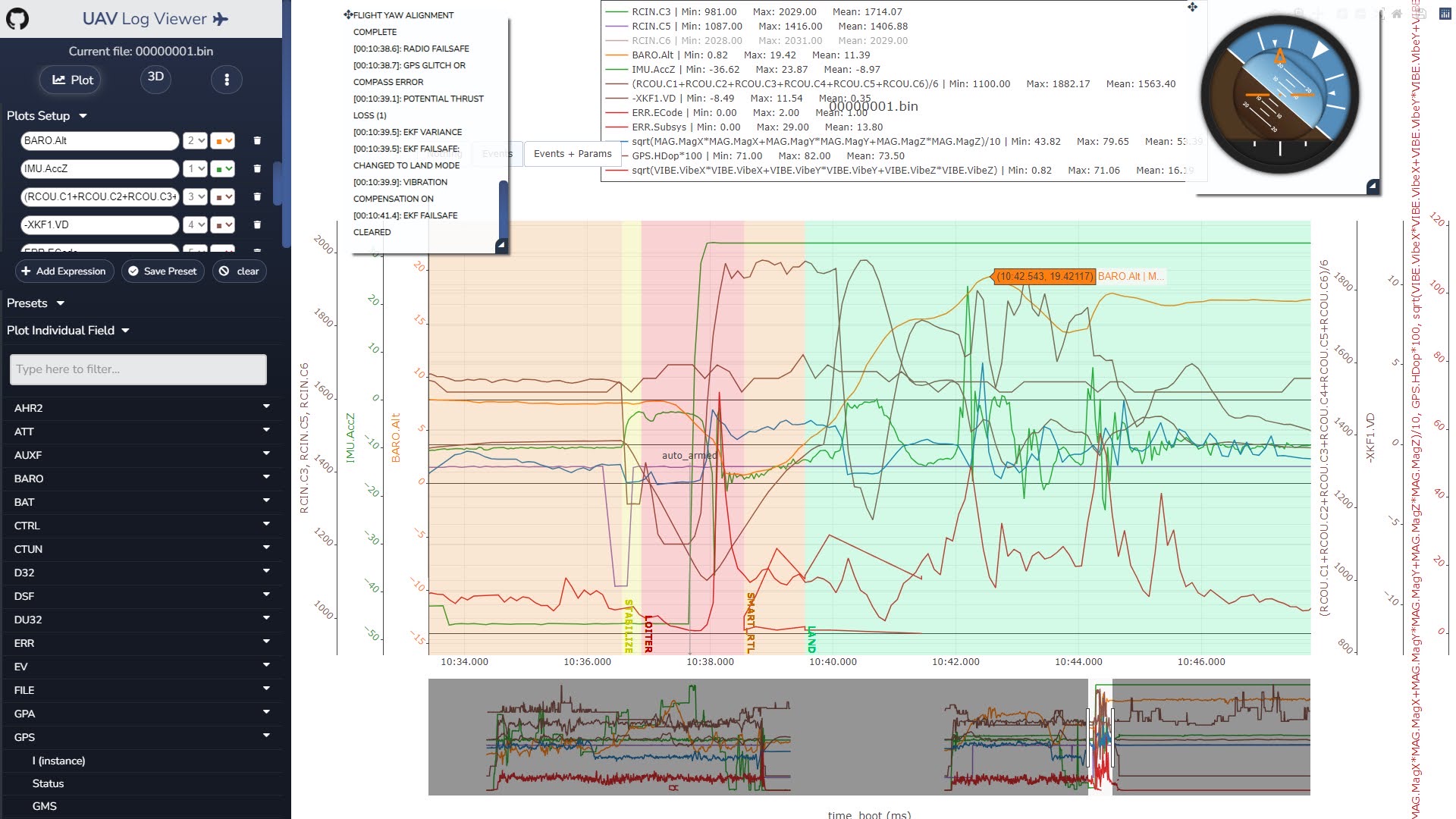
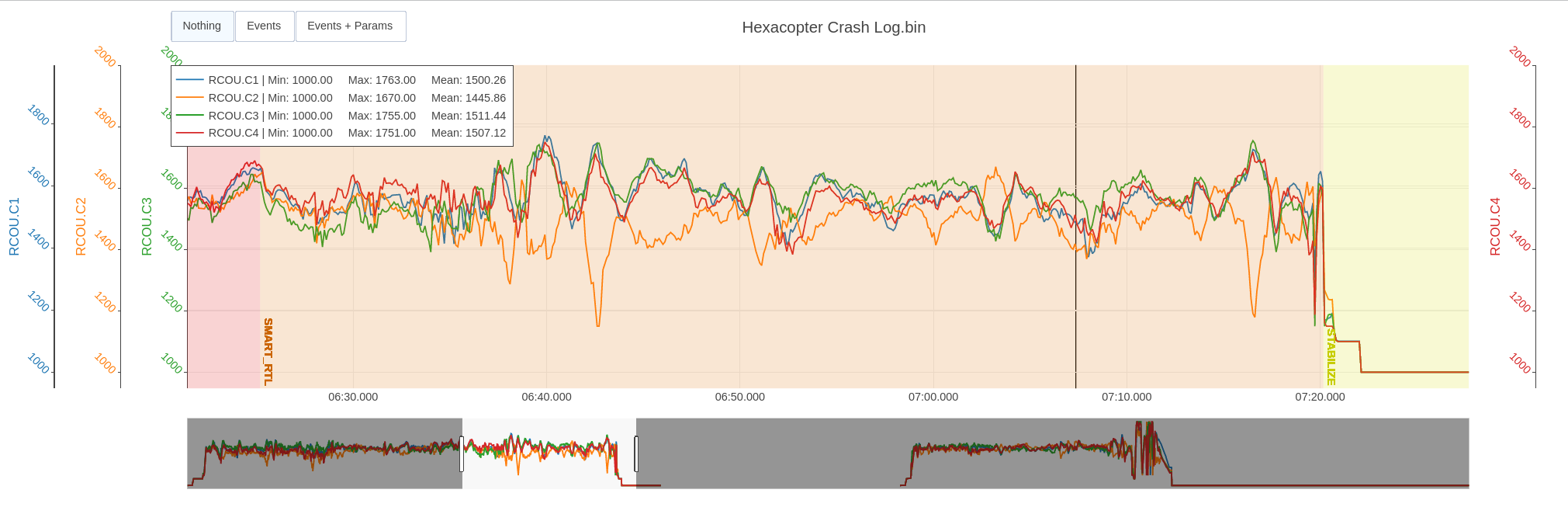
I took off in stabilize mode, and went out over the field, decided to test some SRTL. The drone returned as expected, but apparently my throttle was down when I tried switching to loiter (flipped to stab and then loiter). The copter went in almost a free fall, and that is probably why I slammed the throttle. I don’t remember exactly, But it did a hard hit on the ground before it could decelerate enough. I tried to disarm, but RCIN got stuck at full throttle. Probably a physical failure? Or receiver interference from the ESCs at full throttle which hasn’t been tested before?
The drone took of immediately like a rocket, giving me barely any time to react or even understand what’s happening. A radio failsafe logged within like half a second, and the mode switched to SRTL as expected. But weirdly, the motors remained in full throttle. Why is that? I would expect srtl to throttle down and climb steadily to the rtl altitude. At the same time, several errors triggered, probably due to interference at full throttle (there is clearly some mag interference). Then EKF failsafe caused a switch to land mode. Motors throttled down, but by now the drone had enough velocity to complete the rest of the climb trajectory and get stuck 18+ meters high on the tree.
There was comolete loss of radio control from there. I had to wait for wind to throw it down several minutes later. ![]()
Coming back, all the electronics seem to be functional, including a GoPro. But the receiver no longer works. It did have the ground cable torn out from the FC, maybe on the first ground hit, maybe on the tree hit, or perhaps on the final drop.