Hi Everyone,
I have an odd problem with a hexacopter. The company I work for owns 6 of these,

It’s a Skylle from MMC UAV.
All of them work awesomly well, one of them has flown thousands of kilometres and none have any issues except for one in particular. So the tuning is the same for all of them, initially I thought the problem was tuning, but it can’t be if the others don’t have the same issue.
I now know it’s definitely not tuning because the huge oscillations happen randomly, last night it happened with no wind and the copter launched itself sideways over the top of people nearby, it was very frightening.
The .bin files are here;
https://airgeox-my.sharepoint.com/:f:/p/adam_kroll/Evan9DF7rLlKpj-c6CQNB40B845mVL9X2PUKTmvBK1wFQQ?e=FoL4LU
The copter flew fine for the first 50 hours, the first log is the first day it happened, at 14:18:20, 14:18:50 and 14:22:16.
After this flight I thought it was a tuning issue because RC out 3 and 4 were hitting minimum PWM values.
So I did a couple of tuning flights, triple checked all of the parameters, updated the firmware to 4.2.3, but the probem persisted on the second .bin file.
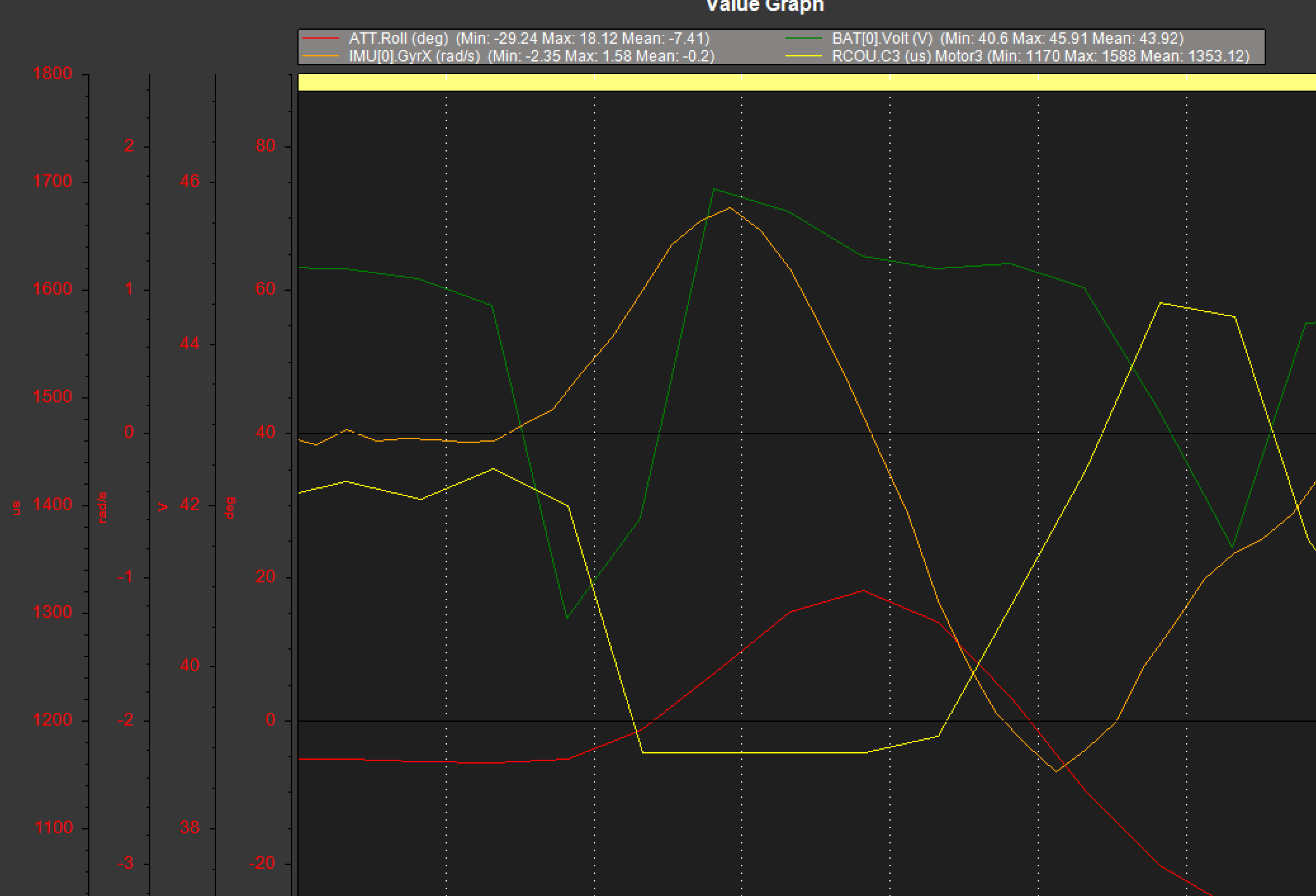
The wild oscillations happened at 18:24:39 and 18:26:27. After looking at these logs I thought it was the gyro’s, GyrX and GyrY may spike slightly before the huge roll and pitches.
I then did an accelerometer calibration and compass calibration for good measure and then flew again, producing the third bin file, but the wild oscillations happened again at 17:32:13.
I’m at a loss now as to the cause of this, I’m using a cube orange, I noticed that the GyrX and GyrY spikes that may precede the wild oscillations are shown in all three IMU’s, which is odd because the Cube is supposed to have two different types of IMU’s with different characteristics, which probably rules out a hardware failure.
The vibrations are low, I’m using an RTK GPS, I’m using a Mausch power board so there’s no power issues, I’m using the drotek compass, everything seems to be working fine, I can’t work out what the issue is. Your help would be much appreciated.