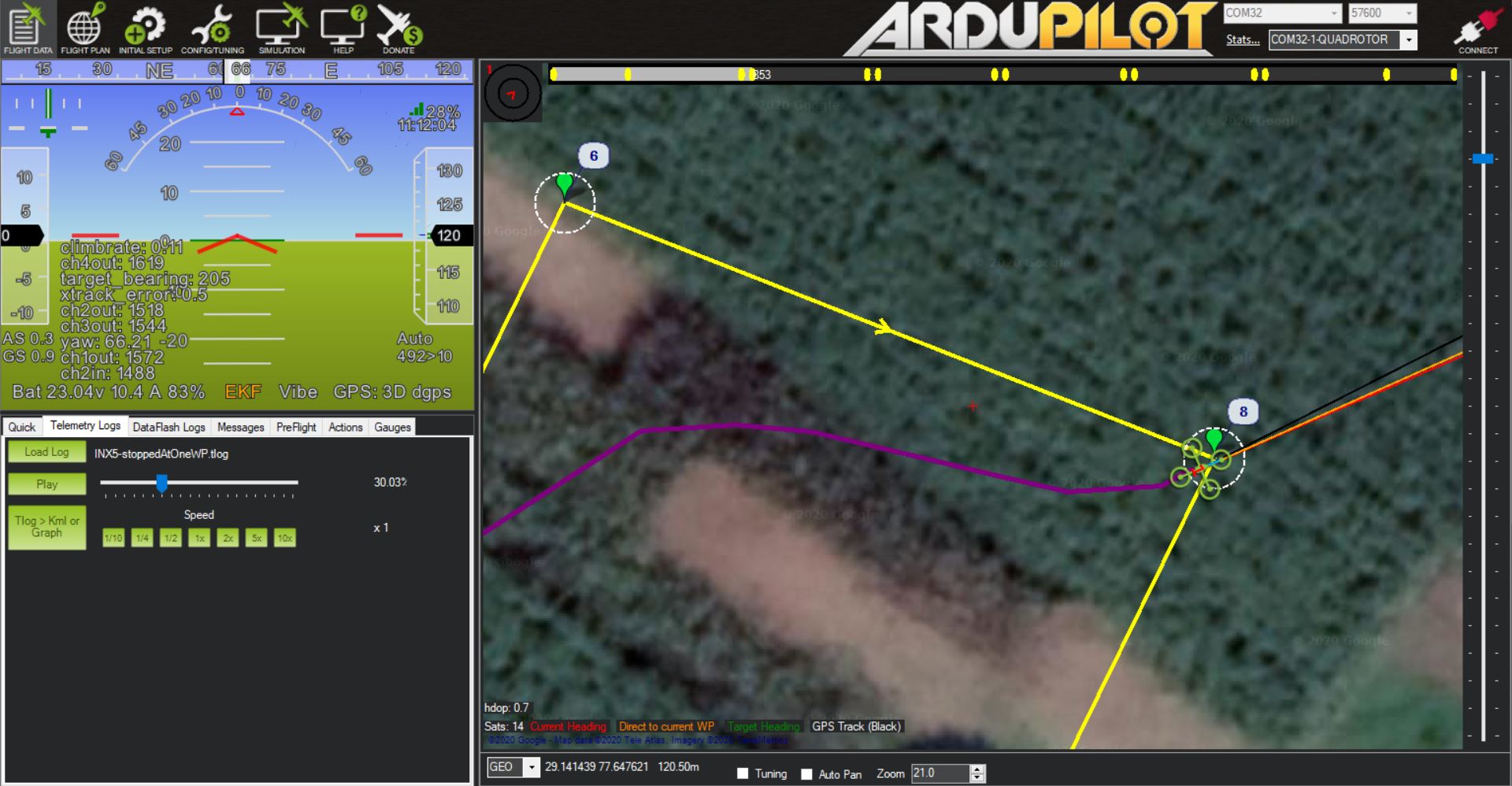
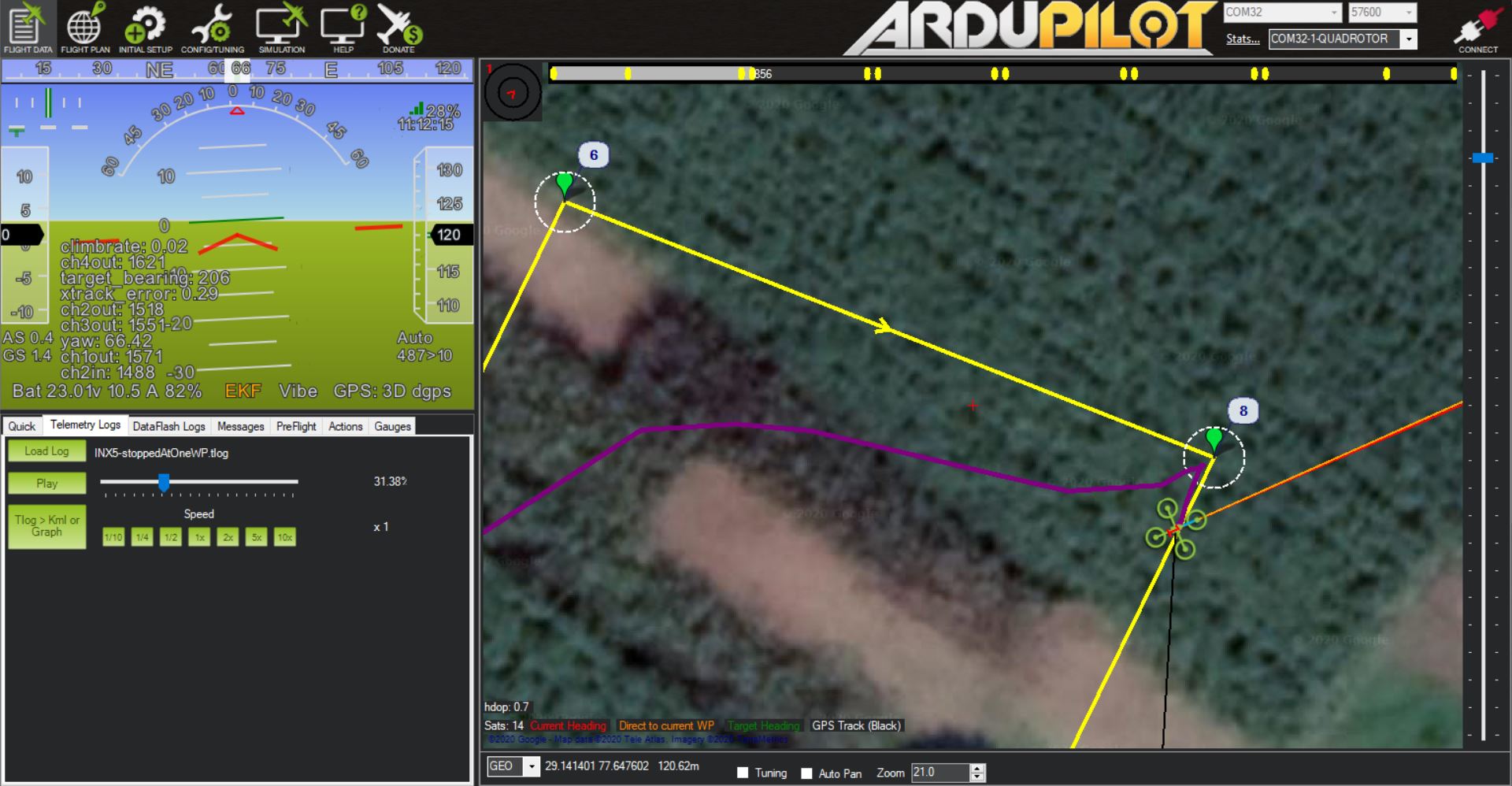
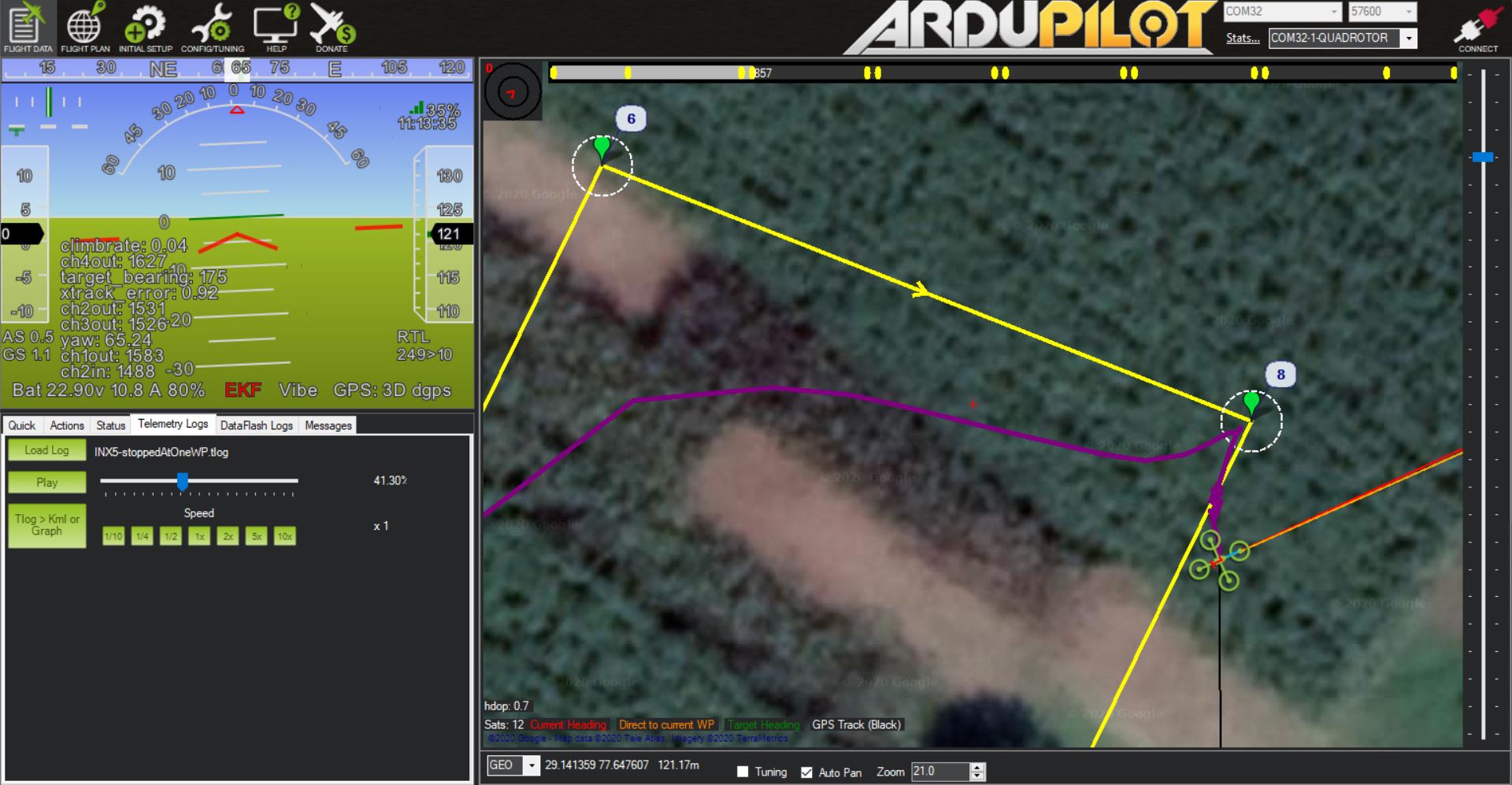
For one of my flights while doing a grid following based mission, the copter got stuck just after command number 8 (3rd waypoint in the mission) for many seconds. Even after doing RTL the copter was still stuck at the same position and then after a while it started to return back to the home position.
The firmware is a custom firmware based on ardcuopter-4.0.3 with no changes to the control or navigation part of the code. Have done 100’s of flight with this firmware on more than multiple platforms but observed this issue only for the first time today. And did 4 more flights after this with the issue not repeating again.
Any help in debugging the cause of the issue is highly appreciated.
If possible onboard logs are far better for detailed analysis.
It’s hard to be sure but it looks like when it was stuck the EKF’s heading was not good (on MP’s HUD the EKF label goes red and we see the “Compass” bar goes up into the red). I suspect the heading estimate was incorrect and it couldn’t get close enough to the waypoint to consider it complete.
Unfortunately the onboard log is not available for this flight. But I am still wandering if with tlog itself we can figure out, what possibly could cause an issue of this kind.
Yes, the EKF compass values are quite high maybe due to not calibrating in this new location of flying. But I wander if that can or if that should cause this kind of an issue in the first place.
The copter has actually reached the given waypoint and even crossed it, after which only it got stuck at a certain position just after the waypoint. This can be seen from the attached images (from tlog playing in MP) and also the mission command numbers’ value tell the same story.
Also, even after RTL command, the drone did not move for a long time and then suddenly started to move while the heading EKF variance value was still pretty high.