Hi, I’ve been testing version 4.0.4 for a few weeks and everything seemed to be fine. But suddenly my copter just flipped around the roll axis and felt out of the sky! The parachutes released after the copter was flipping, but because the Copter flipped so fast, they shot out in ground direction and the copter fell into the parachutes. Luckily there was only a material damage. The Copter weighs 13KG and I can’t tell from the logs where the problem was. I was flying a waypoint mission and the Copter had already reached the target and was standing still when it suddenly flipped. I have flown with version 3.6.9 before and this has never happened before.
It would be very helpful if someone could check the logs.
After the crash I checked the motors and they were all spinning.
Thanks for your answers, but it did not look like a motor loss to me. The copter flipped completely around his roll axis in less than a second. When i had a motor loss in the past it was never like that.
maybe it was not motor or ESC failure i told motor lose because motor 4 was maxed and its happen on a motor or ESC failure
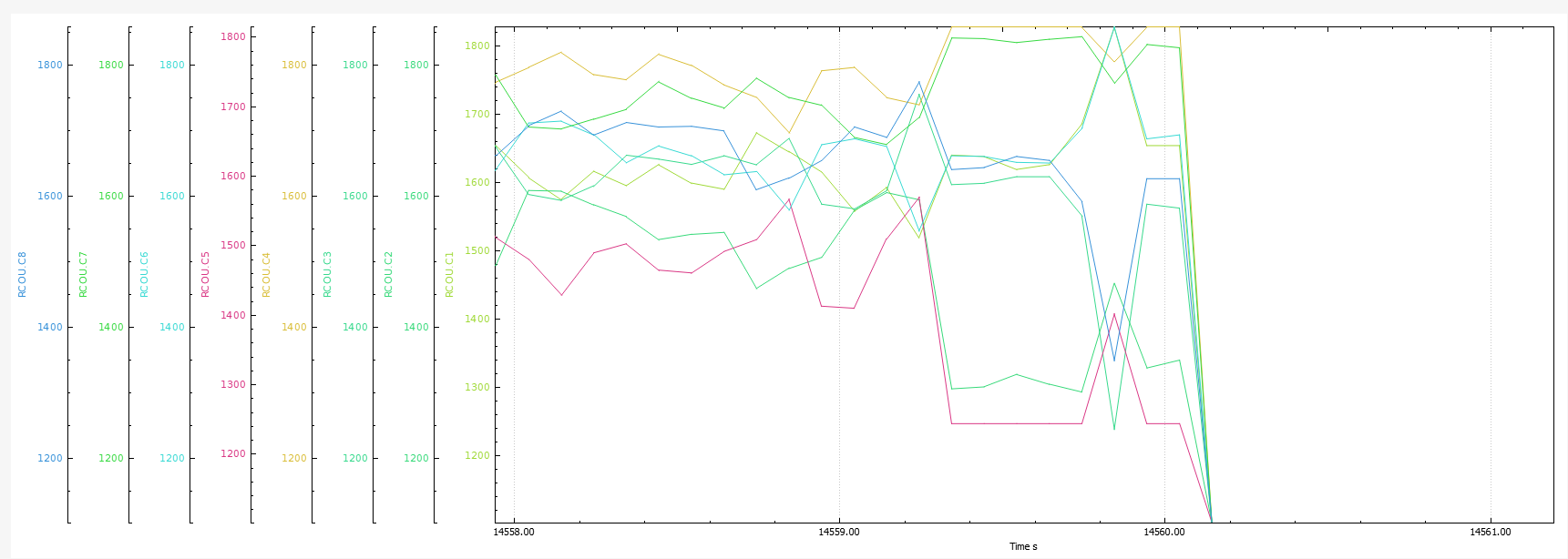
but main problem is large motor unbalance thats make instability
motor 5 was working at ~1500 and motor 4 was at ~1800 thats too large
but totally test your motors before another flight
I didn’t look at the logs but I can tell you from experience that a motor failure can cause the craft to completely flip and do it real fast. It’s hehehe rather impressive how fast it can happen.
Even for an Octoquad with different prop sizes top to bottom (not sure of yours) the motor imbalance would be large as Hosein noted. The right rear motors (4&7) are being commanded to almost max even at hover. Then 4 is commanded to max with 7 close which is usually an indicator of thrust loss. Further evidence is the opposite arm motors (2&5) drop to compensate.