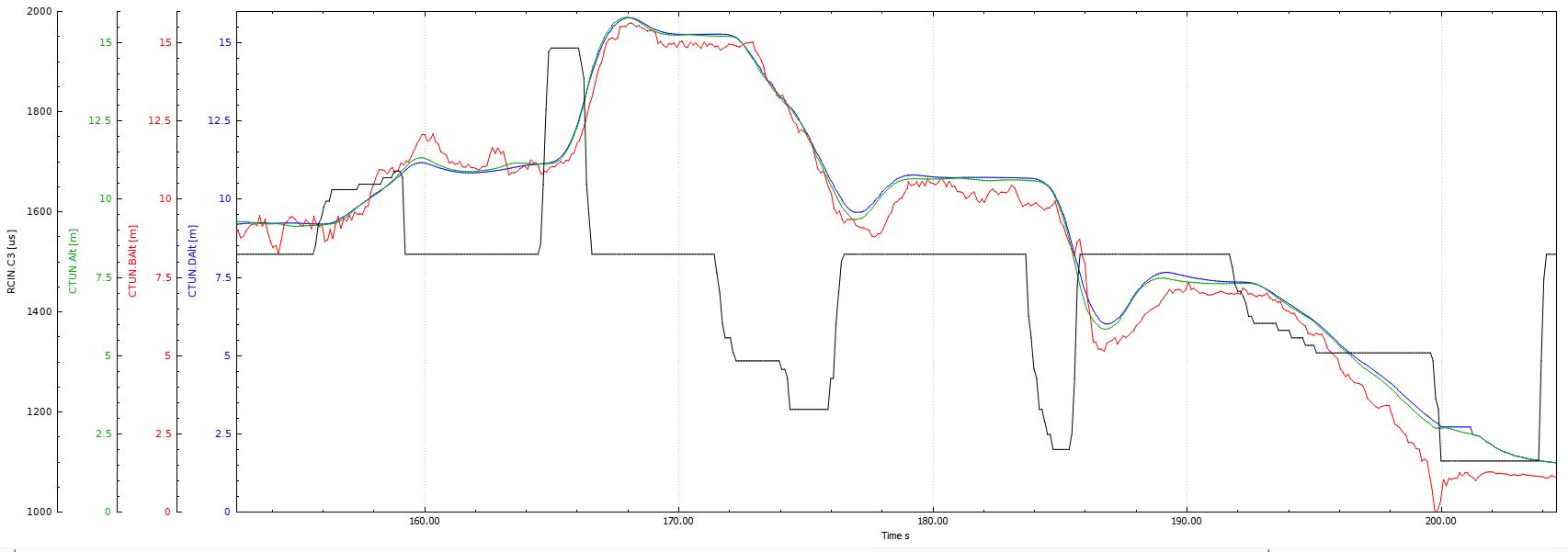
I’m looking for advice on getting my copter to hold altitude after throttling up or down. You can see in the log that after ascending or descending anything faster than “very slow” results in the copter “bouncing” a couple feet until settling at it’s altitude. What parameters should I tweak to get it to hold altitude after going up or down? Other than this issue it flies great.
I believe those values are the result of a quick attempt to fix this issue a month back or so with xfacta, in the middle of working on other tuning issues.
Ah OK. Makes sense actually as the stock advice is to have the P term=Mot Thrust Hover and I 2X that. But increasing these values was what I would have suggested too. So this is the vertical acceleration gain perhaps an increase in the position gain (PSC_POSZ_P) is warranted. You could try a small change and see.