Hi there,
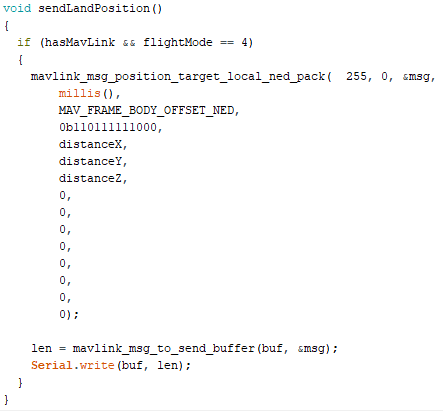
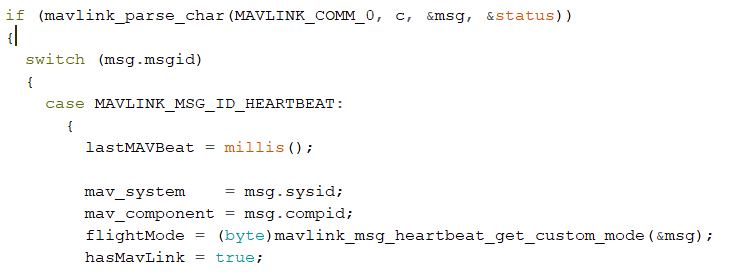
I have an esp32 with camera connected to the pixhawk4 mini (mavlink1) and wanted to do precision landing in guided mode. By an led pattern I can see in flight that the camera finds the desired landing spot. With 25hz I am then sending the NED positions to the drone but it does nothing.
Additional infos: The landing camera is attached to the gimbal. I just use my phones led and put it under the drone. By finding the first and last brightest pixel I determine the middle. Then converting it to NED based on this link:
Do I have to activate somewhere that I use a companion computer, like when use precision landing feature? I thought in guided mode I can just send position data via Mavlink…
Can you replace the value 255 to the System ID of your drone or just the value 0 (which means broadcasting the command to every system that in communication)?
@rmackay9 I read a post from you a few years ago where you successfully tested the precision landing. (Not in guides mode, but with companion computer in land mode) Nevertheless, you may have a tip about what I’m doing wrong, I would be very happy!
Thanks in advance